DeviceSupervisor Agent 用户手册
DeviceSupervisor Agent
用户手册
(适用于EC & IG)
Version4.0,2024年6月
本手册中描述的软件是根据许可协议提供的,只能按照该协议的条款使用。
版权声明
© 2024 映翰通网络 保留所有权利。
商标
InHand标志是映翰通网络的注册商标。
本手册中的所有其他商标或注册商标属于其各自的制造商。
免责声明
本公司保留对此手册更改的权利,产品后续相关变更时,恕不另行通知。对于任何因安装、使用不当而导致的直接、间接、有意或无意的损坏及隐患概不负责。
入门
1.简介
DeviceSupervisor Agent(以下简称DSA)是运行在网关中的数采上云软件,为用户提供了便捷的数据采集、数据处理、数据上云和协议转换功能,支持Modbus、ISO on TCP、EtherNet/IP等多种工业协议和DNP3、IEC 60870、IEC 61850等电力协议解析。
版本号为1.2.X的DSA简称为 DSA 1.0,版本号为2.X.X的 DSA简称为DSA 2.0。版本号为3.X.X的DSA简称DSA3.0。本手册以采集PLC的数据并上传至EMQX的在线MQTT服务器为例说明DSA 3.0如何通过DSA实现PLC数据采集和数据上云。
1.1 准备硬件设备及其数据采集环境
1.1.1.1 串口/以太网接线
接通网关的电源并按照拓扑使用以太网线/串口线连接IG网关和PLC。(EC系列和IG系列的拓扑图是一致的,以IG502为例)
IG502串口端子接线说明如下图:
1.1.2 设置InGateway访问PLC
InGateway的网口默认IP地址请参考铭牌上的IP地址信息。为了使InGateway能够通过网口访问以太网PLC,需要设置该网口与PLC处于同一网段。
1.1.3 更新InGateway设备软件版本
如需获取InGateway产品最新软件版本及其功能特性信息,请资源中心。
1.1.3.1 EC系列
使用DSA时,EC942的固件版本应为`V2.0.10`及以上;EC312的固件版本应为`V2.0.1`及以上
更新固件版本如图所示(固件版本重启后生效):
1.1.3.2 IG系列
使用DSA时,SDK版本应为`py3sdk-V1.4.5`及以上。固件版本最低需求请参考表格:
更新固件版本如图所示:
更新SDK如图所示:
2. 安装和管理DSA
2.1 安装并运行DSA
2.1.1 EC系列
2.1.1.1 安装和运行Python App
在EC系列中安装和运行Python App(以下简称App)请参考如下流程:
点击“添加”按钮并选择需要安装的App包文件,随后点击确认。
2.1.1.2 更新Python App运行配置
如果已安装的App支持导入配置文件修改运行方式,可参照如下流程更新App运行配置:
导入成功后将按照导入后的配置文件运行。
2.1.1.3 更新Python App版本
通常如需更新Python App版本时只需要在如下页面导入新版本的App即可。
更新完成后如下图所示:
2.1.1.4 查看/下载日志
查看/下载App运行期间的日志,在如图所示界面:
在“级别”中选择日志等级后,将不会显示和保存低于该等级的日志。日志等级排序:ERROR>WARN>INFO>DEBUG>所有。
下载日志可以点击“下载”按钮。
2.1.2.1 安装和运行Python App
在IG系列中安装和运行Python App(以下简称App)请参考如下流程:
安装App前需要确保已安装Python SDK且Python边缘计算引擎已启用,如下图所示:
点击“添加”按钮并选择需要安装的App包文件,随后点击确认。
导入成功后可以查看已导入的App,如下图所示:
勾选启用,运行APP
启用后App将在IG系列产品中运行并且每次开机后自动运行。
2.1.2.2 更新Python App运行配置
安装的App支持导入配置文件修改运行方式,点击导入配置按钮并选择需要导入的配置文件,随后点击确认。
导入成功后重启App,App重启完成后将按照导入后的配置文件运行。
2.1.2.3 更新Python App版本
通常如需更新Python App版本时只需要导入新版本的App即可。
更新完成后如下图所示:
2.1.1.4 查看/下载日志
查看/下载App运行期间的日志,在如图所示界面:
设置日志等级过后,日志会显示和保存高于这个等级的日志。日志等级在参数设置界面设置,日志等级排序:ERROR>WARN>INFO>DEBUG。
3. 快速入门
本教程以Modbus TCP协议为例,介绍DSA如何快速开始使用采集设备数据并将数据上传到EMQX MQTT公有云服务上以及接收MQTT消息写值的简单示例。
3.1启用Modbus模拟器
教程使用的是ModRSsim2作为Modbus TCP Slave,运行ModRSsim2.exe软件并配置端口号,如下图所示:
3.2配置南向控制器
运行device_supervisor后,添加南向控制器。在控制器协议中选择Modbus TCP协议并配置相关参数。
- 名称:控制器名称,例如:Modbus TCP
- 控制器协议:选择Modbus TCP
- IP地址:示例填写安装 Modbus 模拟器 PC 端的 IP 地址
- 端口号:默认端口502
- 从站地址:默认即可。
3.3配置采集测点
在测点列表,添加需要采集的设备测点并配置测点名称,地址,数据类型等,如下图所示:
配置好,点击“确认”,添加测点。在创建测点后,等待几秒,控制器连接状态仍然处于 断开连接,请进行以下操作查找原因:
1. 创建控制器时,IP和端口是否正确。
2. 网关是否能访问到模拟器所在IP及端口
3.4配置MQTT云服务
启用MQTT云服务,并配置服务器地址,MQTT客户端ID,端口号等参数。如下图所示:
- 服务器地址:MQTT服务器地址,例如EMQX MQTT公有云服务器地址broker.emqx.io
- 客户端ID:自定义客户端ID,是连接服务器的唯一标识符。
- 端口号:MQTT服务器端口号,例如EMQX MQTT公有云服务器端口1883
配置好,点击提交后,等待几秒后在状态栏中可以查看到MQTT连接状态为连接成功。如果一直显示为正在连接,请进行以下操作查找原因:
1. 检查设备时候能够访问网络;
2. 检查服务器地址和端口等配置信息是否正确。
如果连接一会儿又断开,MQTT客户端ID是否被使用,或者更换客户端ID
3.5配置MQTT发布/订阅脚本
在MQTT连接成功后,如下图所示添加一个发布脚本:
- 名称:自定义发布脚本名称
- 数据源类型:示例选择“测点数据”
- 分组/标签:选择测点所在分组,示例使用的是default分组
- Topic:发布主题,示例使用inhand_pub
- Qos(MQTT):支持0、1、2
- 函数代码:使用默认即可
如下图所示,添加一个订阅脚本:
- 名称:自定义脚本名称
- Topic:订阅消息主题,教程中使用inhand_sub
- Qos(MQTT):1
- Payload类型:教程中选择Plaintext
函数代码:
# Enter your python code.
import json
from common.Logger import logger
from quickfaas.measure import write_plc_values
def write_callback(message, userdata):
logger.debug("write plc response: %s, userdata:%s" % (message,
userdata))
def main(topic, payload, cloudName):
logger.debug("subscribe topic: %s, payload: %s, cloudName: %s" % (topic, payload, cloudName))
write_plc_values(message=json.loads(payload), callback=write_callback, userdata="")
3.6在EMQX 公有云客户端查看数据/写值
教程使用EMQX官网提供的客户端工具 连接公共的 EMQX 代理查看网关上传到 MQTT Broker的数据。
在打开的弹窗中点击“New Connection”,在随后弹出的界面中填写Name字段后,其余配置不需要修改,最后点击“Connect”。
在MQTT客户端给网关采集的模拟器写值,如下图所示是将网关采集的测点“WORD”的值修改为10,Paylaod:{"WORD": 10}
4. 概念
DSA内部系统概要框图:
- 控制器:控制器指网关页面上实现启用和管理各个采集协议的组件
- (南向)驱动程序:(南向)驱动程序是指在网关中,与PLC设备进行通信的软件程序。通常是针对特定厂商或特定设备类型进行开发的,使用设备厂商提供的管理协议或 API 进行通信。例如Modbus、OPC等协议
- 测点:测点指网关上配置的PLC设备的采集点位
- 分组:分组是指在网关中将测点数据或者告警项根据不同的需求和应用场景分成不同的组别。以便于管理
- 协议转换:协议转换是指将南向采集到的数据,通过其他协议进行数据转发
- 事件总线:事件总线指在网关内部各个服务之间使用MQTT消息进行的通信的消息通道
- 数据预处理:分为告警和数据变换
- 告警:告警指采集的数据可以在网关配置告警条件,当触发时,进行告警
- 数据变换:数据变换指采集的数据可以在网关配置数据运算以及映射值。
- 快函数:快函数指在网关配置的脚本函数。
- 历史数据库:缓存测点采集的历史数据
功能特性
1. 测点监控
1.1 监控列表
在“监控列表”界面,可以添加控制器和测点去采集PLC数据,并且查看控制器的状态和配置信息以及数据的采集信息。
在当前页面可以对控制器进行编辑、复制、删除等操作;对测点可以进行添加,导入、导出、删除等操作。
监控列表的页面展示如图所示:
1.1.1 添加/编辑控制器
点击“添加”/“编辑”按钮,在添加控制器页面选择控制器协议,如Modbus RTU并配置控制器的从站地址,通讯方式,轮询周期等参数。注意:控制器名称不能重复。
在高级设置中,可以对控制器的报文处理进行配置。如Modbus RTU控制器的高级设置中,可以对字节序、超时时间、通讯时间等参数进行配置。
1.1.2 复制控制器
在工业现场往往有许多相似的PLC配置参数信息和测点配置信息,为了达到快速配置的目的,我们引用了“复制控制器”功能。该功能可以帮我们快速添加相似配置的控制器和测点配置,避免了重复的配置操作。点击控制器卡片右上角的“...”,显示更多控制器操作,点击“复制”。复制控制器可以在配置好一个控制器后,快速添加第二个控制器,复制控制器会将控制器下的测点全部复制。
点击“复制”按钮后,我们按照需求修改一下差异配置,如控制器名称、从站地址等,然后提交即可。
复制完成后如图,会自动生成和第一个控制器一样的测点以及控制器信息:
1.1.3 禁用/启用控制器
当采集多个PLC设备,网关控制器状态或采集的数据异常时,这时我们只启用异常控制器方便查看日志和实时通讯报文。点击控制器卡片右上角的“...”,显示更多控制器操作,选择“禁用”后,控制器便不再进行采集和上报。
禁用后,控制器卡片将变灰,如图:
当想要重新启用控制器时,点击控制器卡片右上角的“...”,选择“启用”后,控制器将重新进行采集和上报
1.1.4 实时通讯报文
当采集控制器状态显示异常或采集的数据异常时,查看网关控制器和PLC设备之间的实时通讯报文就很重要了。DSA是支持显示通道实时通讯报文,任意选择一个控制器,点击控制器卡片右上角的“...”,点击“实时通讯报文”,会显示当前通道的全部通讯报文交互。例如启用两个Modbus RTU协议控制器,都使用RS485通讯口,实时通讯报文就会显示出两个控制器的通讯报文。
实时通讯报文显示效果如下(注意:如果需要下载通讯报文,需要先在控制器的配置的高级设置中启用“存储通讯报文”,才会显示“下载”按钮。所有控制器的通讯报文都以HEX格式显示和保存):
1.1.5 添加测点
在“测点列表”中可以添加测量点位去采集PLC设备的数据。点击“添加”按钮,在弹出框中配置测点参数,如在Modbus RTU协议的控制器下添加测点并配置测点名称、地址、数据类型等参数。(注意:测点名称在所属控制器中不可重复):
在“测点列表”中的“导入”按钮可以将测点的CSV文件导入当前网关;“导出”按钮可以将当前网关的测点配置导出成一个CSV文件。具体测点的CSV文件可以参考:测点CSV文件参数说明
1.2 分组
分组可以将监控列表中的测点进行分组管理,测点配置分组后,历史数据的存储和测点上报消息隔间都按照配置的分组来管理。如需为测点配置不同的上报间隔或需要按照不同的MQTT主题上报相应的测点数据时,可以添加一个新的分组来管理不同需求的测点。(注意:default分组不可以删除)
分组界面如图所示:
具体的分组CSV文件请参考:分组CSV文件参数说明
在分组页面添加新分组。界面如下:
添加分组参数介绍:
- 名称:分组名称
- 上报周期:分组内测点的上报周期。
- 周期上报Onchange数据:启用后,数值未变化的Onchange数据也会按照Onchange上报周期上传数据。默认是关闭。
- Onchange上报周期:Onchange数据的固定上报周期。
历史数据是DSA提供的一个数据存储功能,DSA可以为测点分组创建数据表,并把分组数据按指定的存盘策略插入数据库;通过以下参数配置:
- 最大条数:单个分组下最大存储的历史数据条数。
- 存储策略:历史数据的存储周期
- 与上报周期同步:按照上报周期存储历史数据。
- 独立存盘周期:自定义历史数据的存储周期。
- 存储方式:历史数据的存储方式。切换存储路径后将清除存储的历史数据
- 网关存储:历史数据存储在网关本身的存储空间中。
- USB:历史数据存储在网关外接的USB存储空间中。
- SD卡:历史数据存储在网关外接的SD卡存储空间中。
添加分组后,添加测点时可以选择将测点关联到该分组或者在测点列表中选择测点添加到指定分组中。分组中的测点会按照分组的上报间隔上报数据。
点击“导出历史数据”可导出该分组CSV格式的历史数据
点击“清空历史数据”可清空该分组已存储的历史数据。
1.3 历史数据库
历史数据库是用于存储测点的历史数据。在测点的配置中启用“存储历史数据”功能后,测点的数据就可以存储在历史数据库中。测点的历史数据是按照测点所属的分组来存储的,这样导出历史数据的时候,可以更便捷的查找测点的历史数据。
2.告警
2.1 实时告警
我们配置告警规则后,告警项触发告警后,实时告警页面将显示所有的已触发告警的告警项。
在实时告警的表格里,将显示告警配置里的一些参数,如“名称”、“控制器”、“告警等级”等。
- “状态”:当前告警项的触发状态,显示的都为“已触发”状态
- “数值”:触发告警时刻的值
- “时间”:触发告警时的时间
- “操作”:可以跳转到“历史告警”页面查看详情
下图是一条实时告警显示界面:
2.2 告警规则
告警规则可以帮助我们在网关侧对于某些测点的数值进行监控,当超过正常范围后,可以及时进行提醒。例如在工业场景中,对于电压值和电流值的范围以及一些设备的启停状态都是需要重点关注的,当我们在网关侧配置了采集这些数据测点的告警规则后,如果触发了告警,可以使用MQTT云服务及时上报通知以免造成不必要损失。
在告警规则页面配置告警规则,点击“添加”按钮后,在弹出框中配置告警规则参数。参数如下:
- 名称:告警名称
- 控制器:告警测点所属控制器
- 测点名称:触发告警的测点名称
- 告警等级:从低到高分别支持“提醒”、“警告”、“次要”、“重要”、“严重”
- 告警条件:
- 判断条件:支持“=”、“!=”、“>”、“≥”、“<”、“≤”
- 逻辑条件:
- 无逻辑条件:仅通过单个判断条件判断告警
- &&:通过两个判断条件相与判断告警
- ||:通过两个判断条件相或判断告警
- 告警内容:告警内容
- 告警标签:告警标签用于为告警分类,方便告警上云时快速选择
下图是一条告警等级为提醒的告警,属于default标签内。该告警在测点数值>30且<50时产生告警;不在此范围时不产生告警或告警消除。
在“告警规则”页面中,“导入”“导出”告警规则的CSV文件请参考:告警规则CSV文件参数说明
“添加到标签”功能可以帮助我们快速将多个告警项切换告警标签。下图是将告警项批量添加到“group_test”告警标签中。
2.3 历史告警
在历史告警页面可以帮助我们查看到所有告警项的历史告警,包括已触发和已恢复的告警项,这项功能可以帮助我们了解网关侧在触发/恢复告警项时的原因及时间。
在当前页面中,将展示所有已触发和已恢复的历史告警信息。告警信息包含“告警规则”界面所配置的参数,例如:“名称”、“控制器”、“告警等级”等。其余的参数配置说明如下:
- “状态”:有两种状态,分别为“已触发”、“已恢复”。“已触发”代表当前告警项正在触发告警;“已恢复”代表当前告警项已恢复正常。
- “数值”:当前状态已触发或已恢复时刻告警项的数值。
- “时间”:触发或恢复告警时的时间。
- “操作”:点击“详情”按钮,则可看到当前告警项触发或恢复时的详细信息,“删除”按钮则可将当前告警项在历史告警里删除。
2.4 告警标签
告警标签可以帮助我们管理告警项,当告警项触发告警时,需要上报的MQTT消息,直接选择告警标签可以快速涵括告警标签下的所有告警项。并且当需要用不同的主题上报MQTT消息时,我们可以新增一个告警标签来对不同的告警项进行分组处理,然后在不同的MQTT主题中选择相应的标签即可。
进入告警标签页面查看告警标签内容。
在当前页面的表格中,默认会有一个名称为“default”的告警标签(注:此标签不可删除,其余添加的告警标签可删除)。
点击“添加”按钮后,在弹出框中配置告警标签的名称。(注意:此名称在整个告警标签中唯一,不可重复)。
在“告警标签”页面中,“导入”“导出”告警规则CSV文件请参考告警标签CSV文件参数说明
注意:在删除标签时,会将“告警规则”中属于当前标签的告警项一同删除
3.云服务
在工业场景下,采集到的数据需要上报到云平台帮助企业实现数据的集中管理、智能分析和远程管理。在DSA中,我们在云服务界面可以启用配置相应云服务,帮助客户快速连接使用主流的云服务。
3.1 MQTT云服务
在当前页面可以查看当前MQTT云服务的连接状态和配置信息,并且可以对MQTT云服务进行编辑,导入,导出等操作。点击“添加”按钮可以新增一个MQTT云平台,如当我们需要同时将数据上报至多个云平台时,就可以新增一个MQTT平台来连接云平台上报数据。(注意:MQTT平台的名称不可重复,默认的MQTT云平台的名称为“default”)。如图所示是添加一个名称为“test”的MQTT平台:
添加后的界面如图所示:
勾选启用云服务后,配置界面的“云平台类型”可选择MQTT云服务。“云平台类型”:目前支持的云平台有“标准MQTT”、“MQTT SparkPlugB”、“iSCADA Cloud”、“白鹰能源管家”、“阿里云 IoT”、“AWS IoT”、“Azure IoT”。
“清空离线缓存”:该功能可以清空在MQTT云服务离线后未能发布的MQTT消息。例如当我们调试MQTT功能中,产生的离线数据不想上报至云平台时,可以使用该功能清空离线数据(注:只有Qos大于等于1的消息才缓存)
“导入”:选择MQTT云服务的配置文件,即可导入文件中的MQTT配置及消息管理内的脚本。这个功能可以快速配置启用云服务。例如在不同网关上配置相同的云服务时,配置一台网关后导出的配置文件可以直接导入其他网关使用。
“导出”:点击后将该云的配置和消息管理内的脚本导出到一个”cloud.json”的文件中。
在“上云测点设置”界面中,可以对测点进行屏蔽(屏蔽后不再上报该测点)、修改上云测点名称等操作。
“上云测点名称”:上报云平台的测点名以当前配置项中的名称上报
“屏蔽”:屏蔽后,该测点不再上报云平台
“导入”,“导出”分别可以将上云测点设置的配置信息导入到当前网关,或者将当前网关的上云测点信息导出(注意:上云测点设置里的CSV文件只保存更改了上云测点名称或者屏蔽的测点)。具体CSV文件参数介绍请参考:上云测点设置CSV文件参数说明
“消息管理”:此处可以添加发布脚本和订阅脚本。只有添加了脚本,才可以将消息发布到云平台和订阅云平台的消息(注意:在启用MQTT SparkPlugB云服务后,消息是默认添加好的,不可新增只可以修改)
4.协议转换
在工业场景下的数据通常具有多样性和复杂性,不同的应用场景可能需要不同的通讯协议来满足其特定的需求。DSA的协议转换功能就可以实现数据在不同的应用场景下通过不同的协议实现数据上传(如利用Modbus TCP Slave协议可以将控制器采集的数据转发至SCADA服务器上)。
在当前页面可以对北向支持的协议转换服务进行编辑配置,以及查看连接状态等操作。界面如下图所示:
状态页面可以查看当前协议的连接与运行状态(注意:不是所有协议都有状态页面,例如BACnet Server协议)
配置页面可以对当前协议配置和查看连接参数以及添加映射表功能。如在Modbus TCP Slave的配置界面中,可以配置Modbus TCP Slave的端口号,最大连接数等参数。在映射表中可以执行添加/编辑,导入/导出等操作。
具体映射表CSV文件请参考:映射表CSV文件参数说明
具体协议配置请参考:协议转换
5. 参数设置
在参数设置界面,可以配置网关的通用设置。如设置网关的串口参数,存储配置和自定义参数等。
5.1 串口设置
在串口设置页面可以配置串口的参数,例如配置串口波特率,数据位等。
串口设置的参数如图所示:
各项参数说明如下(RS232和RS485同理):
- 波特率:支持300、1200、2400、4800、9600、19200、39400、57600、115200、230400。默认是9600
- 数据位:支持8和7。默认是8
- 校验位:支持无校验,奇校验和偶校验。默认是无校验
- 停止位:支持1和2。默认是1
- 修改完配置后,点击“提交”按钮即可保存配置。
5.2 存储配置
在存储配置界面可以配置网关的日志存储、MQTT离线数据存储和控制器的通讯报文存储。
存储配置的参数如图所示:
各项参数说明如下:
- 日志等级:日志输出的日志等级,日志中不显示低于该等级的日志。日志等级从最低到最高依次支持DEBUG,INFO,WARNING,ERROR。默认是INFO
- 历史告警最大条数:告警里的历史告警最大条数。默认2000
- 离线数据储存方式:支持USB,SD卡,网关存储。默认是用网关存储
- 离线数据最大条数:离线数据储存的最大条数。默认10000
- 离线数据上报频率:离线数据等MQTT连接后,离线数据上报的频率。默认200ms
- 离线数据重传策略:支持“一直重传”和“重传指定次数后丢弃”。默认是“一直重传”。“一直重传”:离线数据没接收到服务器回的响应将一直重发,“重传指定次数后丢弃”:重传指定次数后,如果还是没接收到服务器的响应,那么将丢弃这条离线数据,继续发下一条。
- 选择“重传指定次数后丢弃”后,将出现两个配置项:
- 最大重传次数:发布失败后,重新发布的最大次数。默认是3次
- 重传超时时间:发布消息时,如果未收到确认或回复时等待的时间,默认是1000ms
- 通讯报文储存方式:支持USB,SD卡,网关存储。默认是用网关存储
- 通讯报文存放最大条数:默认储存2000
修改完配置后,点击“提交”按钮即可保存配置,如果不想保存当前的修改,那么点击“重置”按钮即可恢复至上一次保存的配置
5.3 自定义参数
自定义参数是定义一些全局的参数,可以在云服务配置、快函数脚本中使用。设置一个全局参数使用,可以修改起来更加方便快捷。例如当一个参数需要在多个自定义快函数中使用,如果使用自定义参数,那么当参数值修改时,只需修改自定义参数界面的参数值就行。
5.3.1配置自定义参数
自定义参数的参数如图所示:
默认有两个参数(注:这两项参数不可删除和修改):
- SN:设备的SN码
- MAC:设备的MAC地址
如果想要新增自定义参数,点击“添加”按钮后,在弹出的窗口中填写“参数”和“参数值”后,点击“确认”按钮即可添加此次修改的值。
“导入”和“导出”按钮分别可以将自定义参数的配置文件导入到当前网关和将当前网关的自定义参数导出成配置文件。具体CSV文件请参考自定义参数CSV文件参数说明
5.3.2使用自定义参数
你可以在自定义参数中自行添加常用参数作为云服务和自定义快函数中的通配符使用。使用方法为${参数名称},如下图所示:
自定义的参数也可以在脚本中通过get_global_parameter()函数获取所有的自定义参数。
脚本示例如下:(该脚本可以在日志中输出所有的自定义参数)
from common.Logger import logger
from quickfaas.global_dict import get_global_parameter
def main():
logger.debug('get global dict: %s' % get_global_parameter())
在自定义快函数中,添加该脚本,如图所示:
输出的结果:
6.自定义快函数
在自定义快函数界面,可以新增Python脚本来实现私有逻辑(新增的脚本以线程的方式启用)。自定义快函数的脚本支持3种触发模式:周期触发;本地订阅消息触发;快函数启动触发。
自定义快函数界面按钮介绍如下图所示:
6.1 周期触发
周期触发的快函数会间隔该时间周期后触发运行脚本一次
下图是添加一条10秒周期触发的自定义快函数,使用默认的脚本。该脚本会在日志中每隔10秒输出“Timer start”和“Timer end”。
各项参数说明如下:
- 名称:任意不重复的名称
- 模式:选择周期触发
- 周期:触发该快函数的周期。单位可以选择:小时,分钟,秒,默认是秒。
- 入口函数:与脚本中的入口函数名称保持一致
- 函数代码:使用Python代码自定义该周期触发脚本的任务逻辑。
6.2 本地订阅消息触发
本地订阅消息触发当订阅到需要订阅的Topic时触发运行脚本一次。网关事件总线上的Topic可以从事件总线(Event Bus)中查找。
下图是添加一条订阅控制器写值消息的本地订阅消息快函数,当给控制器写值的时候就会触发该脚本。使用默认脚本,就会在日志中打印写值消息
各项参数说明如下:
- 名称:任意不重复的名称
- 模式:选择本地订阅消息触发
- 订阅Topic:订阅网关内部消息的Topic
- 入口函数:与脚本中的入口函数名称保持一致
- 函数代码:使用Python代码自定义该周期触发脚本的任务逻辑。
6.3 快函数启动触发
快函数启动触发,只有当快函数启动完成时,触发运行脚本一次。
下图是添加一条快函数启动触发模式的快函数。使用默认脚本,当快函数启动后,会在日志中打印“QuickFunction start”
各项参数说明如下:
- 名称:任意不重复的名称
- 模式:选择快函数启动触发
- 入口函数:与脚本中的入口函数名称保持一致
- 函数代码:使用Python代码自定义该周期触发脚本的任务逻辑。
附录:南向驱动程序列表
ABB
*ABB Robot
ABB Robot是ABB公司生产的一系列工业机器人产品,用于自动化生产线上的各种应用。ABB Robot通过TCP/IP协议与外部设备、控制系统或上位机进行通信,以实现数据交换、控制和监控等功能。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*ABB Robot
- IP地址:IP地址
- 端口号:端口信息
- 用户名:机器人侧配置的登录用户名信息
- 密码:机器人侧配置的密码信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 描述:可以对该控制器添加注释信息
- 高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 读取类型:读取机器人的具体参数类型,支持以下类型:
- 当前控制状态
- 当前错误状态
- 物理关节点信息
- 速度配比信息
- 当前工作模式
- 本机输入IO
- 本机输出IO
- 本机输入IO2
- 本机输出IO2
- 日志记录
- 系统信息
- 目标坐标信息
- 伺服使能状态
- 当前程序运行状态
- 任务列表
- 数据类型:只支持STRING(8位字符串)
- 长度:该测点的字符串长度
- 字符编码格式:与机器人侧的字符编码格式保持一致,支持:ASCII,UTF-8,UTF-16小端,UTF-16大端以及GB2312编码。
- 读写权限:只支持Read
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
AllenBrandly(罗克韦尔)
EtherNet/IP (CompactLogix)
EtherNet/IP 是一种工业以太网协议,用于在工业控制系统中实现设备间的通信和数据交换。它是基于标准的 TCP/IP 协议栈,并在其上添加了用于工业自动化领域的应用层协议,提供了实时性、可靠性和安全性等方面的支持。
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择EtherNet/IP (CompactLogix)
- IP地址:IP地址
- 端口号:端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 按位取值:当数据类型选择非BIT,FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值或者数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
- 测点地址示例说明:
A1:和PLC地址一致,注意数据类型也要保持一致;
Program:MainProgram.A1:如果变量是局部的,前面带上程序名;
slot=2;A1:地址也可以携带额外的slot信息;
i=A[0]:如果A在PLC是基于uint类型的bool数组,可以使用这种方式访问A中的每一位;
B[0]:如果B是数组,可以使用索引访问每个元素;
EtherNet/IP (Micro)
EtherNet/IP (Micro) 是 EtherNet/IP 协议的一种变种,它是为了适配更小型的设备和资源受限的环境而设计的。与标准的 EtherNet/IP 协议相比,EtherNet/IP (Micro) 在通信过程中使用了更简化的消息格式和轻量级的通信机制,以减少资源消耗和通信开销。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择EtherNet/IP(Micro)
- IP地址:IP地址
- 端口号:端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 槽号(slot):PLC槽号
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- BCD32:32位BCD码
- FLOAT:32位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 按位取值:当数据类型选择非BIT,FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值或者数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
- 测点地址示例说明:
A1:和PLC地址一致,注意数据类型也要保持一致;Program:MainProgram.A1:如果变量是局部的,前面带上程序名;slot=2;A1:地址也可以携带额外的slot信息;i=A[0]:如果A在PLC是基于uint类型的bool数组,可以使用这种方式访问A中的每一位;B[0]:如果B是数组,可以使用索引访问每个元素;
EtherNet/IP (MicroLogix)
EtherNet/IP (MicroLogix) 指的是在 MicroLogix 控制器系列中使用 EtherNet/IP 协议进行通信
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择EtherNet/IP EtherNet/IP (MicroLogix)
- IP地址:IP地址
- 端口号:端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- STRING:8位字符串
- 按位取值:当数据类型选择非BIT,FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值或者数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING,并且未启用按位取值型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
- 测点地址示例说明:
- A9:0: ASCII
- B2:0: Bit
- N2:0:Integer
- L17:0:Long Integer
- ST2:0:String
- F8:5:Floating
- S:1/15:Status
- C2:0:Counter
- T2:0:Timer
- I:0/15:Input
- O:0/15:Output
EtherNet/IP (Unconnected)
EtherNet/IP (Unconnected) 是指在 EtherNet/IP 协议中使用的一种通信方式。未连接方式是指在通信时不需要建立持久的连接,每次通信都是独立的、即时的。这种方式类似于 UDP 协议中的无连接通信方式,它更加轻量级和灵活,适用于一些实时性要求不那么严格的场景。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择EtherNet/IP (Unconnected)
- IP地址:IP地址
- 端口号:端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 槽号(slot):PLC槽号
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 标签:测点地址
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- STRING:8位字符串
- 按位取值:当数据类型选择非BIT,FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值或者数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
- 测点地址示例说明:
- A1:和PLC地址一致,注意数据类型也要保持一致;
- Program:MainProgram.A1:如果变量是局部的,前面带上程序名;
- slot=2;A1:地址也可以携带额外的slot信息;
- i=A[0]:如果A在PLC是基于uint类型的bool数组,可以使用这种方式访问A中的每一位;
- B[0]:如果B是数组,可以使用索引访问每个元素;
*SLC Net
SLC Net 是指 "Symbian Limited Compatibility Network", 它是 Symbian 操作系统的网络通信协议。Symbian 操作系统是一种曾经广泛应用于智能手机和移动设备的操作系统,它提供了丰富的功能和应用程序支持。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*SLC Net
- IP地址:IP地址
- 端口号:端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 按位取值:当数据类型选择非BIT,FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值或者数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
- 测点地址示例说明:
- A9:0: ASCII变量
- B2:0: Bit变量
- N2:0:Integer变量
- F8:5:Floating point
- S:1/15:Status变量
- ST2:0:String
- C2:0:Counter
- I:0/15:Input
- O:0/15:Output
- R9:0:Control
- T2:0:Timer
- L9:0:Long Integer
BACnet
BACnet IP
BACnet是一种用于楼宇自动化和控制系统的通信协议,用于在建筑设备之间进行数据通信和控制。基于Internet协议(IP)进行通信。BACnet IP使用标准的IP网络作为通信介质,通过以太网或者Wi-Fi等网络设备来连接建筑设备,实现设备之间的数据交换和控制。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择BACnet IP
- IP地址:IP地址
- 端口号:端口信息
- 设备ID:被采集设的Bacnet ID
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 启用批量采集:是否对控制器下的测点进行批量采集,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- APDU超时:应用程序协议数据单元 (APDU) 超时时间;
- APDU重发次数:通信失败,尝试重复通信次数;
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 对象类型:支持以下类型
- 模拟输入
- 模拟输出
- 模拟值
- 数字输入
- 数字输出
- 数字值
- 多态输入
- 多态输出
- 多态值
- 控制环
- 趋势记录
- 最小扩展对象
- 实例号:对应对象类型的示例号
- 数据类型:支持以下数据类型
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- ULONG:64位无符号整数
- LONG:64位有符号整数
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
BACnet MS/TP
BACnet MS/TP(Master-Slave/Token-Passing)是BACnet协议的一种变体,用于在建筑自动化系统中的串行网络中进行通信。MS/TP是一种常见的BACnet物理层协议,通常用于连接建筑设备,如传感器、执行器和控制器等,通过串行通信进行数据交换和控制。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择BACnet MS/TP
- 通讯方式:支持RS232和RS485,默认使用RS485
- 设备ID:被采集设的Bacnet ID
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 描述:可以对该控制器添加注释信息
- 本地节点地址:网关作为BACnet客户端采集数据,该参数为网关的BACnet客户端的节点地址
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 启用批量采集:是否对控制器下的测点进行批量采集,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- APDU超时:应用程序协议数据单元 (APDU) 超时时间;
- APDU重发次数:通信失败,尝试重复通信次数;
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 对象类型:支持以下类型
- 模拟输入
- 模拟输出
- 模拟值
- 数字输入
- 数字输出
- 数字值
- 多态输入
- 多态输出
- 多态值
- 控制环
- 趋势记录
- 最小扩展对象
- 实例号:对应对象类型的示例号
- 数据类型:测点数据类型支持以下数据类型
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- ULONG:64位无符号整数
- LONG:64位有符号整数
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Beckhoff(倍福)
*ADS
Beckhoff(倍福)工业自动化系统中常用的一种通信协议和通信机制。ADS 是一种高性能、实时性强的通信协议,用于在 Beckhoff 控制器、工程站(Engineering Station)和其他支持 ADS 的设备之间进行通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*ADS
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- AMS端口号:Ams路由器的端口号,TwinCAT2:801,811,831 TwinCAT3:851,852,853
- 目标NetId:目标的网络ID号,举例:192.168.100.1.1.1。
- 发送方NetId:发送方的网络ID号,举例:192.168.100.1.1.1,并不是ip地址。实际值需要在TwinCAT上设置。
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:支持以下数据类型
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
CJT188
CJT188-2004
CJT188-2004是中国的一个通信标准,用于监控与控制系统中的数据传输和通信。这个标准主要适用于电力系统、输配电设备、变电站等领域的监控与控制系统,以实现设备之间的数据交换、监控和控制。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择CJT188-2004
- 仪表地址:表号
- 仪表类型:从下拉框中选择
- 10:冷水水表
- 11:生活热水水表
- 12:直饮水水表
- 13 中水水表
- 20:热量表(计热量)
- 21:热量表(计冷量)
- 22:热量表(计热量和冷量)
- 30:燃气表
- 40:自定义仪表
- 通讯方式:支持RS232和RS485,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯时间间隔:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:请从下拉框中选择
- 数据类型:
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:只支持Read,只读,不可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Delta(台达)
Delta TCP
Delta TCP是指台达(Delta)电子公司所使用的基于TCP/IP协议的通信方式。Delta TCP可以用于数据采集和处理应用。通过与数据采集设备或数据库系统连接,可以实现对设备数据的实时采集、存储和分析,以实现生产过程的监控和优化。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Delta TCP
- 站号:设备标识符,和设备保持一致,范围0-255
- IP地址:设备的IP地址信息
- 端口号:设备的端口号信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- PLC类型:台达的系列信息,支持DVP或者是AS系列
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:支持以下数据类型:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Delta Serial
Delta Serial 是指台达(Delta)电子公司所使用的串行通信方式。可以用于数据采集和处理应用。通过与数据采集设备或数据库系统连接,可以实现对设备数据的实时采集、存储和分析,以实现生产过程的监控和优化。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Delta Serial
- 站号:设备标识符,和设备保持一致,范围0-255
- 通讯方式:支持RS232和RS485,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- PLC类型:台达的系列信息,支持DVP或者是AS系列
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:支持以下数据类型:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Delta Serial ASCII
Delta Serial 是指台达(Delta)电子公司所使用的串行通信方式。它使用 ASCII 码作为数据的编码格式。可以用于数据采集和处理应用。通过与数据采集设备或数据库系统连接,可以实现对设备数据的实时采集、存储和分析,以实现生产过程的监控和优化。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Delta Serial ASCII
- 站号:设备标识符,和设备保持一致,范围0-255
- 通讯方式:支持RS232和RS485,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- PLC类型:台达的系列信息,支持DVP或者是AS系列
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:支持以下数据类型:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Delta Serial over TCP
Delta Serial over TCP 是指将串行通信(Serial Communication)通过 TCP/IP 网络进行传输的一种方式。台达(Delta)电子公司通常采用这种方式来实现其设备的远程监控、远程控制和数据采集等功能。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Delta Serial over TCP
- 站号:设备标识符,和设备保持一致,范围0-255
- IP地址:设备的IP地址信息
- 端口号:设备的端口号信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- PLC类型:台达的系列信息,支持DVP或者是AS系列
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:支持以下数据类型:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
DLT电表
DLT645-1997
DLT645-1997 是中国国家标准 GB/T 645-1997《多功能电能表通信规约》的一个版本。该标准规定了多功能电能表与外部设备之间的通信协议和数据格式,用于在电能表和监测系统之间进行数据交换和通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择DLT645-1997
- 从站地址:表号
- 通讯方式:支持RS485和RS232
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址,地址格式支持0000或者是00-00。
- 数据类型:测点数据类型,包括:
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
DLT645-2007
DLT645-2007 是中国国家标准 GB/T 645-2007《多功能电能表通信规约》的一个版本。该标准是 DLT645 系列标准的一个重要版本,用于规定多功能电能表与外部设备之间的通信协议和数据格式。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择DLT645-2007
- 从站地址:表号
- 通讯方式:支持RS485和RS232
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 初始化激活:是否在打开串口的时候进行激活命令的操作。打开后,报文帧头添加FE FE FE FE。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址,地址格式支持0000或者是00-00。
- 数据类型:测点数据类型,包括:
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
DLT645-2007 over TCP
DLT645-2007 over TCP 是指将 DLT645-2007 通信规约应用于 TCP/IP 网络的通信方式。DLT645-2007 是多功能电能表通信规约的一个版本,而 TCP 是一种常用的传输控制协议,用于在网络中实现可靠的数据传输。使用 DLT645-2007 over TCP 的通信方式,可以充分利用 TCP 协议的可靠性和稳定性,确保数据的安全传输和可靠接收。这种方式适用于需要远程监测和管理电能数据的场景,如电力系统监控、能源管理系统等。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择DLT645-2007 over TCP
- 站号:表号
- IP地址:电表的IP地址
- 端口号:电表的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:连接超时时间:建立连接的超时时间。
- 初始化激活:是否在打开串口的时候进行激活命令的操作。打开后,报文帧头添加FE FE FE FE。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址,地址格式仅支持00-00格式(必须添加“-”)。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*DLT698
DLT698 是中国国家标准 GB/T 26880-2011《电力信息采集系统通信协议》的一种实现,它是基于 IEC 62056 系列标准(DLT645)的电力信息采集系统通信协议。DLT698 主要用于电力信息采集系统中的数据采集、传输和管理,是一种通用的电力行业通信协议。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*DLT698
- 站号:表号
- 通讯方式:支持RS485和RS232
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级);
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址,地址格式仅支持00-00格式(必须添加“-”)。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
DNP3
DNP3 TCP
DNP3 TCP(Distributed Network Protocol 3 over TCP/IP)是一种可靠、高效的远程监控和控制系统通信协议,面向远程监控和控制系统的通信协议,适用于电力系统、水务系统等基础设施的自动化领域
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择DNP3 TCP
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 主站地址:主站地址是一个唯一的标识符,用于标识主站设备在通信网络中的位置和身份。
- 从站地址:从站地址是指从站设备在通信网络中的唯一标识符,用于标识从站设备的身份和位置。
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- class 1 扫描时间:主站周期性地向从站发送 Class 1 数据请求的时间间隔
- class 2 扫描时间:主站周期性地向从站发送 Class 2 数据请求的时间间隔
- class 3 扫描时间:主站周期性地向从站发送 Class 3 数据请求的时间间隔
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 采集重试次数:采集失败重新采集的次数
- 连接超时时间:建立连接的超时时间。
- 接收主动上报消息:接收主动上报消息通常是由从站主动向主站发送事件报告或异常报告。启用后,网关才对主动上报的消息做处理。
- 操作模式:
- 直接操作:主站发送的控制命令会直接传输到从站,从站会立即执行相应的操作,并将执行结果返回给主站。
- 选择后操作:主站发送的控制命令会传输到从站,从站会执行相应的操作,并将执行结果返回给主站。但是,从站不会立即完成操作,而是等待主站发送确认信号或选择信号。只有在主站发送确认信号或选择信号后,从站才会完成操作。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:从下拉框中选择
- 地址:测点地址,范围:0-65535的整数
- 数据类型:根据选择的地址类型,支持不同的数据类型,请根据下拉框中支持的数据类型选择
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值和数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:根据地址类型不同,支持的读写权限也不同。选择地址类型后,实际支持的 读写权限请从下拉框中选择。
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
DNP3 UDP
DNP3 UDP是DNP3协议在UDP网络传输层上的应用。UDP是一种面向无连接的传输协议,它提供了简单的数据传输服务,通常用于对实时性要求较高、数据传输量较小、对数据可靠性要求较低的场景。例如,在远程监控、遥测、遥控等应用中,可以使用DNP3 UDP进行数据传输,以实现实时监测和控制。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择DNP3 UDP
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 主站地址:主站地址是一个唯一的标识符,用于标识主站设备在通信网络中的位置和身份。
- 从站地址:从站地址是指从站设备在通信网络中的唯一标识符,用于标识从站设备的身份和位置。
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- class 1 扫描时间:主站周期性地向从站发送 Class 1 数据请求的时间间隔
- class 2 扫描时间:主站周期性地向从站发送 Class 2 数据请求的时间间隔
- class 3 扫描时间:主站周期性地向从站发送 Class 3 数据请求的时间间隔
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 采集重试次数:采集失败重新采集的次数
- 连接超时时间:建立连接的超时时间。
- 接收主动上报消息:接收主动上报消息通常是由从站主动向主站发送事件报告或异常报告。启用后,网关才对主动上报的消息做处理。
- 操作模式:
- 直接操作:主站发送的控制命令会直接传输到从站,从站会立即执行相应的操作,并将执行结果返回给主站。
- 选择后操作:主站发送的控制命令会传输到从站,从站会执行相应的操作,并将执行结果返回给主站。但是,从站不会立即完成操作,而是等待主站发送确认信号或选择信号。只有在主站发送确认信号或选择信号后,从站才会完成操作。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:从下拉框中选择
- 地址:测点地址,范围:0-65535的整数
- 数据类型:根据选择的地址类型,支持不同的数据类型,请根据下拉框中支持的数据类型选择
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值和数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:根据地址类型不同,支持的读写权限也不同。选择地址类型后,实际支持的 读写权限请从下拉框中选择。
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
DNP3 RTU
在DNP3 RTU中,RTU是一种远程终端单元,用于数据采集、监控和控制等任务。DNP3 RTU是基于DNP3协议的RTU设备,通常用于实时监测和控制电力系统、水务系统、燃气系统等工业控制领域。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择DNP3 RTU
- 通讯方式:支持RS232和RS485,默认使用RS485
- 主站地址:主站地址是一个唯一的标识符,用于标识主站设备在通信网络中的位置和身份。
- 从站地址:从站地址是指从站设备在通信网络中的唯一标识符,用于标识从站设备的身份和位置。
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- class 1 扫描时间:主站周期性地向从站发送 Class 1 数据请求的时间间隔
- class 2 扫描时间:主站周期性地向从站发送 Class 2 数据请求的时间间隔
- class 3 扫描时间:主站周期性地向从站发送 Class 3 数据请求的时间间隔
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 采集重试次数:采集失败重新采集的次数
- 连接超时时间:建立连接的超时时间。
- 接收主动上报消息:接收主动上报消息通常是由从站主动向主站发送事件报告或异常报告。启用后,网关才对主动上报的消息做处理。
- 操作模式:
- 直接操作:主站发送的控制命令会直接传输到从站,从站会立即执行相应的操作,并将执行结果返回给主站。
- 选择后操作:主站发送的控制命令会传输到从站,从站会执行相应的操作,并将执行结果返回给主站。但是,从站不会立即完成操作,而是等待主站发送确认信号或选择信号。只有在主站发送确认信号或选择信号后,从站才会完成操作。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:从下拉框中选择
- 地址:测点地址,范围:0-65535的整数
- 数据类型:根据选择的地址类型,支持不同的数据类型,请根据下拉框中支持的数据类型选择
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值和数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:根据地址类型不同,支持的读写权限也不同。选择地址类型后,实际支持的 读写权限请从下拉框中选择。
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
EFORT(埃夫特)
*EFORT Robot
埃夫特(EFORT)机器人是埃夫特智能装备股份有限公司生产的一系列工业机器人产品,可以通过TCP/IP协议对机器人进行数据交换,控制,监控以及远程访问。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*EFORT Robot
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 读取类型:只支持机器人详细信息
- 数据类型:只支持STRING类型
- 长度:该测点的字符串长度
- 字符编码格式:与机器人侧的字符编码格式保持一致,支持:ASCII,UTF-8,UTF-16小端,UTF-16大端以及GB2312编码。
- 读写权限:只支持Read
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
Euromap
*Euromap-63
Euromap-63是一种用于工业机器人和注塑机之间通信的标准协议。注塑机可以向工业机器人发送注塑过程的相关数据,例如模具开合状态、注射速度、温度等信息。工业机器人可以根据这些数据来执行相应的动作,例如及时调整抓取位置、调整动作速度等,以实现自动化生产线的高效运行。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*Euromap-63
- 文件夹名称:网关的ftp共享文件夹路径
- 最小会话编号:定义的最小可用的会话编号值。它标志着可用的会话编号范围的起始位置。
- 最大会话编号:定义的最大可用的会话编号值。它标志着可用的会话编号范围的结束位置。
- 字符编码:只支持UTF8
- 包括CYCLIC:启用后,循环记录数据,否则只记录一次数据
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
FANUC(发那科)
*FANUC Robot
FANUC Robot是由日本的FANUC公司生产的一系列工业机器人产品,其机器人产品广泛应用于汽车制造、电子制造、金属加工、物流等各个领域。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*FANUC Robot
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 读取类型:只支持机器人详细信息
- 数据类型:只支持STRING类型
- 长度:该测点的字符串长度
- 字符编码格式:与机器人侧的字符编码格式保持一致,支持:ASCII,UTF-8,UTF-16小端,UTF-16大端以及GB2312编码。
- 读写权限:只支持Read
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
*FANUC CNC 0i
FANUC CNC 0i 是日本 FANUC 公司生产的一种数控系统。这种数控系统主要用于控制金属加工机床,如数控车床、数控铣床、数控磨床等,使其能够自动化地进行加工操作。FANUC CNC 0i 数控系统通常具有网络通信功能,允许通过 TCP/IP 协议进行数据监控和通信。通过 TCP/IP 协议,用户可以与 FANUC CNC 0i 系统建立网络连接,监控其状态、读取数据、发送指令等。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*FANUC CNC 0i
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 读取类型:从下拉框中选择
- 数据类型:根据选择的读取类型,支持不同的数据类型,不可更改
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值和数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:根据地址类型不同,支持的读写权限也不同。选择地址类型后,实际支持的 读写权限请从下拉框中选择。
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
FATEK(永宏)
FATEK Programe Port(编程口)
Programe Port 提供了一个物理连接,通常是一个端口,可以通过它与 FATEK PLC 进行通信。这个编程口是用来连接 PLC 与编程设备(如编程器或 PC)进行编程、调试和数据传输的接口。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择FATEK Programe Port
- 从站地址:从站设备的唯一标识
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:从下拉框中选择
- 地址:测点的地址
- 数据类型:根据选择的地址类型,支持不同的数据类型。选择地址类型后,从下拉框中选择数据类型
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值和数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:根据地址类型不同,支持的读写权限也不同。选择地址类型后,实际支持的 读写权限请从下拉框中选择。
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
FATEK Programe Port over TCP
FATEK PLC产品通常支持多种通信方式,包括通过以太网(TCP/IP)进行编程和数据通信。通过将 FATEK Programe Port 映射到 TCP/IP 网络上,用户可以通过网络连接到 PLC,并使用相应的编程软件或工具与 PLC 进行编程、监视和调试。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择FATEK Programe Port ov
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 从站地址:从站设备的唯一标识
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:从下拉框中选择
- 地址:测点的地址
- 数据类型:根据选择的地址类型,支持不同的数据类型。选择地址类型后,从下拉框中选择数据类型
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值和数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:根据地址类型不同,支持的读写权限也不同。选择地址类型后,实际支持的 读写权限请从下拉框中选择。
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Fuji(富士)
*SPB
SPB系列PLC是富士公司生产的一系列可编程逻辑控制器(PLC)产品。SPB系列PLC通常支持各种通信协议和网络连接方式,如以太网、串行通信等,方便与其他设备或上层系统进行数据交换和通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*SPB
- 站号:设备的站号
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*SPB over TCP
将富士SPB 系列可编程逻辑控制器(PLC)使用串行通信协议(如 RS-232、RS-485)的通信数据封装在 TCP/IP 网络上传输的一种通信方式。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*SPB over TCP
- 站号:设备的站号
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*SPH Net
富士的SPH Net是富士电机(Fuji Electric)的产品系列之一,它是一种专有的通信协议。SPH Net通常用于连接PLC(可编程逻辑控制器)和其他自动化设备,以实现数据交换和控制。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*SPB Net
- 站号:设备的站号
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
GE(通用电气)
*SRTP
SRTP 是 SNP 协议的一种特定的子协议,它是 SNP(Series Network Protocol)的实时传输协议(Real-Time Protocol)的缩写。SRTP 通常用于实时数据传输,具有高速和低延迟的特点,适用于对实时性要求较高的应用场景,如控制系统和数据采集等。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*SRTP
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
HJ212
HJ212-2005-Serial
HJ212-2005 是最早的 HJ212 标准版本,于 2005 年发布。它定义了监测设备与数据采集系统之间的通信协议,包括数据帧格式、数据传输方式、通信参数等。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择HJ212-2005-Serial
- 通讯方式:支持RS232和RS485,默认使用RS485
- 设备标识:设备唯一标识
- 密码:访问密码
- 系统编码:采集的点位的系统编码,例如地表水检测的系统编码为21
- 轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 描述:可以对该控制器添加注释信息
高级设置:
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
- 超时时间设置:
- 采集超时时间:采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 监控因子编码:支持“-Rtd”和“-Flag”两种编号的因子。
- 数据类型:如果监控因子编号为“-Rtd”则数据类型支持:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- 如果监控因子编号为“-Flag”,则只支持STRING类型
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
HJ212-2017-Serial
HJ212-2017 是对原有 HJ212 标准的更新和完善,在 2017 年发布。它对 2005 协议进行了优化和扩展,使得数据传输更加稳定、可靠和高效。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择HJ212-2017-Serial
- 通讯方式:支持RS232和RS485,默认使用RS485
- 设备标识:设备唯一标识
- 密码:访问密码
- 状态过期时间:指定时间内控制器或测点未收到新消息时,状态将自动更新为离线
- 描述:可以对该控制器添加注释信息
高级设置:
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 监控因子编码:支持“-Rtd”和“-Flag”两种编号的因子。
- 数据类型:如果监控因子编号为“-Rtd”则数据类型支持:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- 如果监控因子编号为“-Flag”,则只支持STRING类型
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
IEC 60870
IEC 101
IEC 101 是国际电工委员会(International Electrotechnical Commission,简称 IEC)制定的一种用于远动通信的标准协议。它是一种用于电力系统监控和控制的通信协议,主要用于在电力系统中进行远程监测、控制、数据采集和保护等应用。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择IEC 101
- 通讯模式:支持非平衡式和平衡式,非平衡式仅支持同一时间通信双方一方发送数据,属于半双工,适用于RS485场景,平衡式可以支持通信双方同时发送数据,属于全双工,适用于RS232场景
- 链路地址长度:支持1和2。链路层中用于表示设备地址的位数或字节数
- 链路地址:在链路层中用于标识通信设备的唯一标识符
- ASDU长度:应用服务数据单元的字节长度,即CA公共地址的长度,ASDU字段用于区分此链路上不同的子站。如果需要采集多个子站,需要配置多个控制器。支持1和2,默认是2,单位字节
- ASDU地址:应用服务数据单元公共地址,又称CA公共地址。在协议中用于标识和区分不同ASDU的地址或标识符
- IOA长度:信息对象地址字节长度,IOA的长度决定了监测点的数量和范围,默认是2,单位字节
- COT长度:传输原因字节长度,决定了可以表示的传输原因的数量,默认是2,单位字节
- 源地址:用于标识发送数据报文的设备或系统的地址,标识数据包的来源
- 通讯方式:支持RS485和RS232
- 总召周期:系统定期发送总召唤命令的时间间隔
- 电度总召周期:控制系统定期发送电度总召唤命令的时间间隔
- 描述:可以对该控制器添加注释信息
高级设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 链接确认超时:在报文交互时,发起方等待接收方响应的最长时间
- 时钟同步:启用后会周期性地向从站设备发送时钟同步命令,告知设备当前的系统时间或校准值
- 时钟同步周期:发送时钟同步命令的频率
- 操作模式:支持“直接操作”和“选择后操作”。“直接操作”命令由主站直接发送到远程设备,设备收到命令后立即执行相应的操作,无需等待额外的确认或响应。在“选择后操作”模式中,主站首先向远程设备发送一个选择命令,该命令指示设备准备执行特定的操作,但暂时不立即执行。设备收到选择命令后,会将操作置于待执行状态,并向主站发送一个确认响应,表示已经接受了选择命令。然后,主站再发送一个操作命令,指示设备执行特定的操作。设备收到操作命令后,执行相应的操作,并向主站发送一个确认响应,表示操作已经执行完毕。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:即IEC101的类型标识TI,从下拉框中选择
- IOA地址:标识信息对象的地址,1 ~ 16777215的整数
- 数据类型:根据地址类型不同,数据类型中支持的数据类型也不相同。选择地址类型后,实际支持的数据类型请从下拉框中选择。
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值和数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:根据地址类型不同,支持的读写权限也不同。选择地址类型后,实际支持的 读写权限请从下拉框中选择。
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
IEC 104
IEC 104 是一种国际标准协议,用于电力系统中的远动通信。它由国际电工委员会(IEC)制定,是一种用于监控、控制和保护电力系统的通信协议。IEC 104 协议建立在 TCP/IP 网络协议之上,通常使用 TCP 或 UDP 作为传输层协议,在网络中实现数据的可靠传输。它采用了分布式的、面向对象的通信模型,支持点到点(client-server)和点到多点(multicast)等通信模式。
IEC 104 协议主要用于远程终端单元(RTU)、遥控装置、遥信装置等设备之间进行通信。它提供了高效、可靠的数据传输机制,支持多种数据类型和功能码,如遥测数据的采集、遥信信息的传输、遥控操作的执行等。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择IEC 104
- IP地址:主站IP地址
- ASDU地址:应用服务数据单元的字节长度,即CA公共地址的长度,ASDU字段用于区分此链路上不同的子站。如果需要采集多个子站,需要配置多个控制器
- 端口号:主站端口信息
- COT长度:传输原因字节长度,决定了可以表示的传输原因的数量,默认是2
- 总召周期:系统定期发送总召唤命令的时间间隔
- 电度总召周期:控制系统定期发送电度总召唤命令的时间间隔
- K值:未被确认的I格式(信息)APDU(k)最大数目。范围1-32,默认12。
- W值:接收方收到w个I格式(信息)APDU后确认,范围1-32,默认8。
- T0超时(S):T0超时是主站在发送启动帧后等待从站响应的超时时间。如果在T0超时时间内没有收到从站的响应帧,主站将认为通信失败并进行相应的处理。范围1-3000,默认是30,单位是秒。
- T1超时(S):t1规定发送方发送一个I格式报文或U格式(控制)报文后,必须在t1的时间内得到接收方的认可,否则发送方认为TCP连接出现问题并应重新建立连接。范围1-3000,默认是15,单位是秒。
- T2超时(S):t2规定接收方在接收到I格式报文后,若经过t2时间未再收到新的I格式报文,则必须向发送方发送S格式(监控)帧对已经接收到的I格式报文进行认可。范围1-3000,默认是10,单位是秒。注:T2 < T1
- T3超时(S):t3规定调度端或子站RTU端每接收一帧I帧、S帧或者U帧将重新触发计时器t3,若在t3内未接收到任何报文,将向对方发送测试链路帧。范围1-3000,默认是20,单位是秒。注:T3 > T1
- 时钟同步:启用后会周期性地向从站设备发送时钟同步命令,告知设备当前的系统时间或校准值
- 时钟同步周期:发送时钟同步命令的频率
- 操作模式:支持“直接操作”和“选择后操作”。“直接操作”命令由主站直接发送到远程设备,设备收到命令后立即执行相应的操作,无需等待额外的确认或响应。在“选择后操作”模式中,主站首先向远程设备发送一个选择命令,该命令指示设备准备执行特定的操作,但暂时不立即执行。设备收到选择命令后,会将操作置于待执行状态,并向主站发送一个确认响应,表示已经接受了选择命令。然后,主站再发送一个操作命令,指示设备执行特定的操作。设备收到操作命令后,执行相应的操作,并向主站发送一个确认响应,表示操作已经执行完毕。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:即IEC104的类型标识TI,从下拉框中选择
- IOA地址:标识信息对象的地址,1 ~ 16777215的整数
- 数据类型:根据地址类型不同,数据类型中支持的数据类型也不相同。选择地址类型后,实际支持的数据类型请从下拉框中选择。
- 按位取值:当数据类型选择非FLOAT,STRING时,启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值和数据类型为BIT时,可以选择是否将读取的结果取反。
- 小数位:数据类型为FLOAT时测点小数点后的数据长度,最大6位
- 读写权限:根据地址类型不同,支持的读写权限也不同。选择地址类型后,实际支持的 读写权限请从下拉框中选择。
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 储存历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型,并且未启用按位取值时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
IEC 61850
IEC 61850 MMS
IEC 61850 标准是针对电力系统自动化领域的一系列标准,MMS 则是其中一部分,用于定义通信消息的格式和传输方式。IEC 61850 MMS 提供了一种灵活的通信机制,可以用于在电力系统中的不同设备之间进行数据交换、控制和监视。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择IEC 61850 MMS
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 启用身份认证:启用后,需要输入密码进行身份验证
- 密码:身份认证的密码
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 扫描超时时间:MMS 客户端发送请求后等待 MMS 服务器响应的最长时间。
- AP名称:指定ACSE应用程序ID。必须为3 - 10个整数(含整数),以逗号分隔。默认值为“1,1,1,999,1”。
- AE限定符:指定ACSE AE限定符。取值范围为0 - 65535。默认值为12。
- P选择器:配置服务器OSI-PSEL,并用于建立远程服务器连接。它指定一个字节数组,该数组表示为由零或多个空格分隔的十六进制数字对。最大容量为50字节(或100个十六进制字符)。默认值为“00 00 00 01”。
- S选择器:配置服务器OSI-SSEL,并用于建立远程服务器连接。它指定一个字节数组,该数组表示为由零或多个空格分隔的十六进制数字对。最大大小为50字节(或100个十六进制字符)。默认值为“00 01”。
- T选择器:配置服务器OSI-TSEL,并用于建立远程服务器连接。它指定一个字节数组,该数组表示为由零或多个空格分隔的十六进制数字对。最大大小为50字节(或100个十六进制字符)。默认值为“00 01”。
- 控制参数:
- 发起方类别:MMS报文的发起者的类别
- 发起方身份:MMS报文的发起者的身份
- 测试模式:启用后,启用测试模式
- 同步检查:启用后,启用同步检查
- 互锁检查:启用后,启用互锁检查
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 对象引用:通过对象引用,可以准确定位IEC 61850数据模型中的各种对象,并访问其属性和数值。
- 功能约束:
- ST:这表示一种状态信息,其值可以读取、替换、报告和记录,但不能写入。
- MX:这表示一个度量信息,它的值可以被读取、替换、报告和记录,但不能被写入。
- CO:这表示可以操作和读取其值的控制信息。
- SP:这表示一个设定值信息,其值可以被控制和读取。被控制的值立即生效。
- SV:这表示一个替换信息,其值可以写入以替换value属性并读取。
- CF:这表示一个配置信息,其值可以被写入和读取。被控制的值立即生效或延迟生效。
- DC:这表示一个描述信息,其值可以写入和读取。
- SG:实现SGCB类的逻辑设备使用功能约束SG维护所有DataAttributes实例的多个分组值。每个组包含一个具有功能约束SG的每个DataAttribute的值,该值将是当前的活动值。“FC=SG”的DataAttribute不能写入。
- SE:这表示一个可以由SGCB服务编辑的DataAttribute。
- EX:这表示提供对名称空间的引用的扩展信息。扩展与LNs、DATA和DataAttributes的扩展定义一起使用。带FC=EX的DataAttribute的值不能写入。
- BR:这表示BRCB的报表控制信息,可以写入和读取。
- RP:这表示可以写入和读取URCB的报表控制信息。
- LG:它表示LCB的日志控制信息,可以写入和读取。
- GO:这表示可以写入和读取的GoCB的控制信息。
- GS:这表示可以写入和读取的GoCB的控制信息。
- MS:这表示一个MSVCB的采样值控制信息,可以写入和读取。
- US:这表示UNICAST-SVC实例的采样值控制信息,可以写入和读取。
- 数据类型:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- ULONG:64无符号整数
- LONG:64位有符号整数
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:读写权限根据功能约束支持不同的读写权限。选择功能约束后从下拉框中选择读写权限。
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
INOVANCE(汇川)
*INOVANCE Serial
Inovance Serial协议是Inovance设备之间通信的一种协议,通常用于连接Inovance的PLC(可编程逻辑控制器)、HMI(人机界面)或其他设备,以实现数据传输和通信
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*INOVANCE Serial
- 站号:设备标识符
- 通讯方式:支持RS485和RS232,默认使用RS485
- PLC类型:汇川的系列信息,支持AM,H3U,H5U系列
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:从下拉框中选择
- 字符串:从下拉框中选择
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*INOVANCE TCP
Inovance工业自动化设备使用的基于TCP/IP网络的通信协议。通过Inovance TCP,Inovance设备可以通过TCP/IP网络与其他设备(如PLC、HMI、SCADA系统等)进行通信。这种通信方式提供了一种可靠的、实时的数据交换机制,使得用户可以远程监控、控制和管理Inovance设备,实现工业自动化系统的各种功能,如数据采集、远程控制、故障诊断等。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*INOVANCE TCP
- 站号:设备标识符
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- PLC类型:汇川的系列信息,支持AM,H3U,H5U系列
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:从下拉框中选择
- 字符串:从下拉框中选择
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*INOVANCE Serial over TCP
将 Inovance 工业自动化设备原本使用的串行通信协议通过 TCP/IP 网络进行传输的一种通信方式。将串行数据转换成 TCP/IP 数据,从而可以通过以太网网络进行传输。这种功能允许在串行设备之间进行远程通信,同时利用现有的以太网网络基础设施。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*INOVANCE Serial over TCP
- 站号:设备标识符
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- PLC类型:汇川的系列信息,支持AM,H3U,H5U系列
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:从下拉框中选择
- 字符串:从下拉框中选择
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
KEBA
KEBA Socket
KEBA Socket协议是由奥地利自动化公司KEBA开发的一种通信协议,用于与其工业自动化设备进行通信。这个协议通常用于通过网络(通常是以太网)连接到KEBA设备,以实现数据交换和控制。在KEBA Socket协议中,网关是作为TCP Server使用。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择KEBA Socket
- 端口号:设备的端口信息
- 描述:可以对该控制器添加注释信息
高级设置:
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- ULONG:64位无符号整数
- LONG:64位有符号整数
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
KEYENCE(基恩士)
*KEYENCE MC 3E
Keyence(基恩士) KV 系列 PLC 以太网通讯协议(MC 3E 帧)
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*KEYENCE MC 3E
- 通讯数据代码:支持二进制和ASCII
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*Nano
KEYENCE的Nano系列PLC是一款由该公司生产的小型可编程逻辑控制器(PLC)系列产品。这些PLC通常用于控制简单的自动化任务,例如小型机器、设备和工作站的控制。它们的特点通常包括紧凑的尺寸、易于安装和编程,以及适用于各种工业环境的可靠性和稳定性。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*Nano
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 启用批量采集:是否对控制器下的测点进行批量采集,如modbus协议中,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*Nano over TCP
KEYENCE Nano系列PLC使用TCP/IP协议进行通信的功能或选项。通过TCP/IP协议,Nano系列PLC可以与其他设备(如PC、HMI、传感器等)进行通信,以实现数据交换、远程监控和控制等功能
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*Nano over TCP
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 启用批量采集:是否对控制器下的测点进行批量采集,如modbus协议中,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Modbus
Modbus ASCII
Modbus ASCII 是一种基于 ASCII 字符编码的 Modbus 通信协议,用于在串行通信中进行数据交换和设备控制。它是 Modbus 协议的一种变种,通常运行在 RS-232 或 RS-485 等串口通信介质上。Modbus ASCII 协议通常用于工业控制系统中,用于设备间的数据交换和控制操作。它支持多种功能码,包括读取/写入寄存器、读取/写入线圈等,可用于实现对远程设备的监控和控制。Modbus ASCII 协议简单易用,适用于较小规模的系统和设备
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Modbus ASCII
- 从站地址:从站设备的唯一标识
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 16位整数:支持AB和BA,默认使用AB字节序
- 32位整数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 32位浮点数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 64位整数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG,默认使用ABCDEFGH
- 64位浮点数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG
- 字节序,默认使用ABCDEFGH
- 启用组包上报:启用该功能的控制器下的测点可以配置为单独的轮询周期(毫秒级)。在测点配置中启用了“组包上报”的测点按照设定的轮询周期和次数采集数据,并将多次采集的数据组包发布到本地的MQTT主题“ds2/eventbus/south/upload/msec/data/{controllerName}”上。可以在“自定义快函数”页面添加模式为“本地订阅消息触发”的快函数订阅该主题,在快函数中对组包数据进行处理。
- 组包数据轮询周期:组包数据的轮询周期。
- 组包数据上报轮询次数:组包数据的轮询多少次后,统一上报。
- 启用批量采集:是否对控制器下的测点进行批量采集,如modbus协议中,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 写入功能码设置:
- 线圈寄存器写入功能码:支持15(一次写多个线圈寄存器)和05(一次写单个线圈寄存器),默认使用15
- 保持寄存器写入功能码:支持16(一次写多个保持寄存器)和06(一次写单个保持寄存器),默认使用16
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。支持0X(线圈寄存器)、1X(离散寄存器)、3X(输入寄存器)、4X(保持寄存器)
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- BCD32:32位BCD码
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312小端、GB2312大端。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
Modbus RTU
Modbus RTU(Remote Terminal Unit)是一种常用的串行通信协议,用于在工业控制系统中进行设备间的数据交换和控制操作。它是 Modbus 协议的一种变种,通常运行在串行通信介质(如 RS-232、RS-485)上。Modbus RTU 协议支持多种功能码,包括读取/写入保持寄存器、读取/写入线圈等,可以实现对远程设备的监控和控制。它在工业控制领域得到了广泛应用,因为其简单易用、成本低廉、可靠稳定等特点,适用于各种规模和类型的工业控制系统。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Modbus RTU
- 从站地址:从站设备的唯一标识
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 16位整数:支持AB和BA,默认使用AB字节序
- 32位整数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 32位浮点数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 64位整数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG,默认使用ABCDEFGH
- 64位浮点数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG
- 字节序,默认使用ABCDEFGH
- 启用组包上报:启用该功能的控制器下的测点可以配置为单独的轮询周期(毫秒级)。在测点配置中启用了“组包上报”的测点按照设定的轮询周期和次数采集数据,并将多次采集的数据组包发布到本地的MQTT主题“ds2/eventbus/south/upload/msec/data/{controllerName}”上。可以在“自定义快函数”页面添加模式为“本地订阅消息触发”的快函数订阅该主题,在快函数中对组包数据进行处理。
- 组包数据轮询周期:组包数据的轮询周期。
- 组包数据上报轮询次数:组包数据的轮询多少次后,统一上报。
- 启用批量采集:是否对控制器下的测点进行批量采集,如modbus协议中,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 写入功能码设置:
- 线圈寄存器写入功能码:支持15(一次写多个线圈寄存器)和05(一次写单个线圈寄存器),默认使用15
- 保持寄存器写入功能码:支持16(一次写多个保持寄存器)和06(一次写单个保持寄存器),默认使用16
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。支持0X(线圈寄存器)、1X(离散寄存器)、3X(输入寄存器)、4X(保持寄存器)
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- BCD32:32位BCD码
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312小端、GB2312大端。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
Modbus RTU over TCP
Modbus RTU over TCP 是指将 Modbus RTU 协议封装在 TCP/IP 网络协议中进行传输的一种方式。在这种模式下,Modbus RTU 数据帧被封装在 TCP 报文中,通过 TCP/IP 网络进行传输。在 Modbus RTU over TCP 中,Modbus RTU 数据帧被封装在 TCP 报文中的数据部分,并通过 TCP 连接进行传输。接收方收到 TCP 报文后,将其解析出 Modbus RTU 数据帧,再进行处理和响应。这种方式保留了 Modbus RTU 协议的原始特性,同时利用 TCP/IP 网络提供的可靠性和灵活性,适用于各种规模和复杂度的工业控制系统。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Modbus RTU over TCP
- IP地址:从站的IP地址
- 端口号:从站的端口信息
- 从站地址:从站设备的唯一标识
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 16位整数:支持AB和BA,默认使用AB字节序
- 32位整数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 32位浮点数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 64位整数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG,默认使用ABCDEFGH
- 64位浮点数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG
- 字节序,默认使用ABCDEFGH
- 启用组包上报:启用该功能的控制器下的测点可以配置为单独的轮询周期(毫秒级)。在测点配置中启用了“组包上报”的测点按照设定的轮询周期和次数采集数据,并将多次采集的数据组包发布到本地的MQTT主题“ds2/eventbus/south/upload/msec/data/{controllerName}”上。可以在“自定义快函数”页面添加模式为“本地订阅消息触发”的快函数订阅该主题,在快函数中对组包数据进行处理。
- 组包数据轮询周期:组包数据的轮询周期。
- 组包数据上报轮询次数:组包数据的轮询多少次后,统一上报。
- 启用批量采集:是否对控制器下的测点进行批量采集,如modbus协议中,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 写入功能码设置:
- 线圈寄存器写入功能码:支持15(一次写多个线圈寄存器)和05(一次写单个线圈寄存器),默认使用15
- 保持寄存器写入功能码:支持16(一次写多个保持寄存器)和06(一次写单个保持寄存器),默认使用16
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。支持0X(线圈寄存器)、1X(离散寄存器)、3X(输入寄存器)、4X(保持寄存器)
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- BCD32:32位BCD码
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312小端、GB2312大端。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
Modbus TCP
Modbus TCP 是一种基于以太网的 Modbus 协议版本,它使用 TCP/IP 协议进行通信。与传统的 Modbus RTU 协议不同,Modbus TCP 允许设备直接通过以太网互联,不需要任何专用的硬件或通信接口。因此,Modbus TCP 具有更高的通信速率和更广泛的应用范围。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Modbus TCP
- IP地址:从站的IP地址
- 端口号:从站的端口信息
- 从站地址:从站设备的唯一标识
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 16位整数:支持AB和BA,默认使用AB字节序
- 32位整数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 32位浮点数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 64位整数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG,默认使用ABCDEFGH
- 64位浮点数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG
- 字节序,默认使用ABCDEFGH
- 启用组包上报:启用该功能的控制器下的测点可以配置为单独的轮询周期(毫秒级)。在测点配置中启用了“组包上报”的测点按照设定的轮询周期和次数采集数据,并将多次采集的数据组包发布到本地的MQTT主题“ds2/eventbus/south/upload/msec/data/{controllerName}”上。可以在“自定义快函数”页面添加模式为“本地订阅消息触发”的快函数订阅该主题,在快函数中对组包数据进行处理。
- 组包数据轮询周期:组包数据的轮询周期。
- 组包数据上报轮询次数:组包数据的轮询多少次后,统一上报。
- 启用批量采集:是否对控制器下的测点进行批量采集,如modbus协议中,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 写入功能码设置:
- 线圈寄存器写入功能码:支持15(一次写多个线圈寄存器)和05(一次写单个线圈寄存器),默认使用15
- 保持寄存器写入功能码:支持16(一次写多个保持寄存器)和06(一次写单个保持寄存器),默认使用16
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。支持0X(线圈寄存器)、1X(离散寄存器)、3X(输入寄存器)、4X(保持寄存器)
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- BCD32:32位BCD码
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312小端、GB2312大端。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
Modbus RTU Slave
Modbus RTU Slave 是指在 Modbus RTU 通信协议中作为被动设备存在的一方,它接收并响应来自主站(Master)的命令,并提供数据给主站。
在网关的控制器中,Modbus RTU Slave是作为一个只读的采集器,配置好Slave中的寄存器,被动等待主站发送数据报文。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Modbus RTU Slave
- 从站地址:从站设备的唯一标识
- 通讯方式:支持RS485和RS232,默认使用RS485
- 状态过期时间:指定时间内控制器或测点未收到新消息时,状态将自动更新为离线
高级设置:
- 字节序:
- 16位整数:支持AB和BA,默认使用AB字节序
- 32位整数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 32位浮点数:支持ABCD、CDAB、DCBA、BADC,默认使用ABCD字节序
- 64位整数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG,默认使用ABCDEFGH
- 64位浮点数:支持ABCDEFGH、GHEFCDAB、HGEFDCBA、BADCFEHG
- 字节序,默认使用ABCDEFGH
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。支持0X(线圈寄存器)、4X(保持寄存器)
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- BCD32:32位BCD码
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312小端、GB2312大端。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
MITSUBISHI(三菱)
*FX Links
MITSUBISHI(三菱)的FX Links是一种用于连接MITSUBISHI FX系列可编程逻辑控制器(PLC)的通信协议。FX Links通常用于连接PC、HMI(人机界面)或其他设备与MITSUBISHI FX系列PLC进行通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*FX Links
- 站号:和设备保持一致。范围:0-255
- 通讯方式:支持RS485和RS232,默认使用RS485
- 和校验:如果PLC设备配置了相关和校验信息,控制器和设备保持一致。
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*FX Links over TCP
FX Links over TCP 是指将 MITSUBISHI(三菱)的 FX Links 协议封装在 TCP/IP 网络上传输的一种通信方式。通常情况下,FX Links 协议是基于串行通信的,但是通过 FX Links over TCP,可以通过 TCP/IP 网络连接到 MITSUBISHI FX 系列可编程逻辑控制器(PLC),并进行通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*FX Links over TCP
- 站号:和设备保持一致。范围:0-255
- 和校验:如果PLC设备配置了相关和校验信息,控制器和设备保持一致。
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*FX Serial over TCP
将 MITSUBISHI(三菱)FX 系列可编程逻辑控制器(PLC)使用串行通信协议(如 RS-232、RS-485)的通信数据封装在 TCP/IP 网络上传输的一种通信方式。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*FX Serial over TCP
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 是否新版本协议:新版本协议的读取报文是调整过的,根据PLC设备信息来配置
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
MC 1E
三菱PLC MC 协议是一种用于三菱 PLC 与上位机之间进行数据通信的协议,也称为 Mitsubishi Communication Protocol。该协议支持串口、以太网等多种通讯方式,可实现实时数据的采集和交换。
1E帧,A系列以太网接口模块的报文格式。在以太网通信中,A-1E为较早的通信版本,对地址的操作范围有限(数据寄存器区的D0~D6143、D9000~D9255)。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择MC 1E
- 通信数据代码:通信报文格式,支持二进制和ASCII,默认是二进制
- 通讯方式:只支持TCP
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:支持
- M:内部寄存器,
- X:输入继电器,
- Y:输出继电器,
- SM:SM特殊继电器,
- S:步进继电器,
- L:锁存继电器,
- F:报警器,
- V:边沿继电器,
- B:链接继电器,
- SB:特殊链接继电器,
- DX:直接输入,
- DY:直接输出,
- TS:定时器触点,
- TC:定时器线圈,
- SS:累计定时器触点,
- SC:累计定时器线圈,
- CS:计数器触点,
- CC:计数器线圈,
- D:数据寄存器,
- SD:特殊数据寄存器,
- W:链接寄存器,
- SW:特殊链接寄存器,
- R:文件寄存器,
- Z:变址寄存器,
- ZR:ZR文件寄存器,
- TN:定时器当时值,
- SN:累计定时器当时值,
- CN:计数器当前值
- 地址类型如果是以下请注意:
- TS,TC,SS,CS,CC:仅支持BIT数据类型
- D,SD,W,SW,R,Z,ZR,TN,SN,CN不支持BIT数据类型
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
MC 3E
三菱PLC MC 协议是一种用于三菱 PLC 与上位机之间进行数据通信的协议,也称为 Mitsubishi Communication Protocol。该协议支持串口、以太网等多种通讯方式,可实现实时数据的采集和交换。
3E帧,QnA系列以太网接口模块的报文格式,兼容SLMP的报文格式。Qna-3E可访问D0~D12287数据
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择MC 3E
- 通信数据代码:通信报文格式,支持二进制和ASCII,默认是二进制
- 通讯方式:支持TCP和UDP
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:支持
- M:内部寄存器,
- X:输入继电器,
- Y:输出继电器,
- SM:SM特殊继电器,
- S:步进继电器,
- L:锁存继电器,
- F:报警器,
- V:边沿继电器,
- B:链接继电器,
- SB:特殊链接继电器,
- DX:直接输入,
- DY:直接输出,
- TS:定时器触点,
- TC:定时器线圈,
- SS:累计定时器触点,
- SC:累计定时器线圈,
- CS:计数器触点,
- CC:计数器线圈,
- D:数据寄存器,
- SD:特殊数据寄存器,
- W:链接寄存器,
- SW:特殊链接寄存器,
- R:文件寄存器,
- Z:变址寄存器,
- ZR:ZR文件寄存器,
- TN:定时器当时值,
- SN:累计定时器当时值,
- CN:计数器当前值
- 地址类型如果是以下请注意:
- TS,TC,SS,CS,CC:仅支持BIT数据类型
- D,SD,W,SW,R,Z,ZR,TN,SN,CN不支持BIT数据类型
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
MC 3C
3C帧,QnA系列串行通信模块专用协议(Qna帧)。三菱 PLC MC 协议是一种用于三菱 PLC 与上位机之间进行数据通信的协议,也称为 Mitsubishi Communication Protocol。该协议支持串口、以太网等多种通讯方式,可实现实时数据的采集和交换。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择MC 3C
- 格式:支持格式1(8进制)、格式1(16进制)、格式4(8进制)、格式4(16进制)
- 站号:和设备保持一致。范围:0-255
- 通讯方式:支持RS232和RS485,默认使用RS485
- 和校验:如果PLC设备配置了相关信息,控制器和设备保持一致。
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:支持
- M:内部寄存器,
- X:输入继电器,
- Y:输出继电器,
- SM:SM特殊继电器,
- S:步进继电器,
- L:锁存继电器,
- F:报警器,
- V:边沿继电器,
- B:链接继电器,
- SB:特殊链接继电器,
- DX:直接输入,
- DY:直接输出,
- TS:定时器触点,
- TC:定时器线圈,
- SS:累计定时器触点,
- SC:累计定时器线圈,
- CS:计数器触点,
- CC:计数器线圈,
- D:数据寄存器,
- SD:特殊数据寄存器,
- W:链接寄存器,
- SW:特殊链接寄存器,
- R:文件寄存器,
- Z:变址寄存器,
- ZR:ZR文件寄存器,
- TN:定时器当时值,
- SN:累计定时器当时值,
- CN:计数器当前值
- 地址类型如果是以下请注意:
- TS,TC,SS,CS,CC:仅支持BIT数据类型
- D,SD,W,SW,R,Z,ZR,TN,SN,CN不支持BIT数据类型
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
MC 3C over TCP
MC 3C over TCP是指将 MC 3C 协议封装在 TCP/IP 网络协议中进行传输的一种方式。在这种模式下,MC 3C 数据帧被封装在 TCP 报文中,通过 TCP/IP 网络进行传输。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择MC 3C over TCP
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 格式:支持格式1(8进制)、格式1(16进制)、格式4(8进制)、格式4(16进制)
- 站号:和设备保持一致。范围:0-255
- 和校验:如果PLC设备配置了相关信息,控制器和设备保持一致。
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:支持
- M:内部寄存器,
- X:输入继电器,
- Y:输出继电器,
- SM:SM特殊继电器,
- S:步进继电器,
- L:锁存继电器,
- F:报警器,
- V:边沿继电器,
- B:链接继电器,
- SB:特殊链接继电器,
- DX:直接输入,
- DY:直接输出,
- TS:定时器触点,
- TC:定时器线圈,
- SS:累计定时器触点,
- SC:累计定时器线圈,
- CS:计数器触点,
- CC:计数器线圈,
- D:数据寄存器,
- SD:特殊数据寄存器,
- W:链接寄存器,
- SW:特殊链接寄存器,
- R:文件寄存器,
- Z:变址寄存器,
- ZR:ZR文件寄存器,
- TN:定时器当时值,
- SN:累计定时器当时值,
- CN:计数器当前值
- 地址类型如果是以下请注意:
- TS,TC,SS,CS,CC:仅支持BIT数据类型
- D,SD,W,SW,R,Z,ZR,TN,SN,CN不支持BIT数据类型
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*MC R
三菱的R系列的MC协议。三菱PLC MC 协议是一种用于三菱 PLC 与上位机之间进行数据通信的协议,也称为 Mitsubishi Communication Protocol。该协议支持串口、以太网等多种通讯方式,可实现实时数据的采集和交换。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*MC R
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
MITSUBISHI Programe Port(编程口)
Programe Port 提供了一个物理连接,通常是一个端口,可以通过它与三菱 PLC 进行通信。这个编程口是用来连接 PLC 与编程设备(如编程器或 PC)进行编程、调试和数据传输的接口。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择MITSUBISHI Programe Port(编程口)
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 是否新版协议:新版本协议的读取报文是调整过的,根据PLC设备信息来配置
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:支持
- M:内部寄存器,
- X:输入继电器,
- Y:输出继电器,
- SM:SM特殊继电器,
- S:步进继电器,
- L:锁存继电器,
- F:报警器,
- V:边沿继电器,
- B:链接继电器,
- SB:特殊链接继电器,
- DX:直接输入,
- DY:直接输出,
- TS:定时器触点,
- TC:定时器线圈,
- SS:累计定时器触点,
- SC:累计定时器线圈,
- CS:计数器触点,
- CC:计数器线圈,
- D:数据寄存器,
- SD:特殊数据寄存器,
- W:链接寄存器,
- SW:特殊链接寄存器,
- R:文件寄存器,
- Z:变址寄存器,
- ZR:ZR文件寄存器,
- TN:定时器当时值,
- SN:累计定时器当时值,
- CN:计数器当前值
- 地址类型如果是以下请注意:
- TS,TC,SS,CS,CC:仅支持BIT数据类型
- D,SD,W,SW,R,Z,ZR,TN,SN,CN不支持BIT数据类型
- 地址:测点地址。地址示例:M0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
OMRON(欧姆龙)
*C-Mode
OMRON(欧姆龙)的C-Mode是一种特定于其工业自动化设备的通信协议。C-Mode是OMRON用于设备之间通信的一种协议,通常用于连接OMRON的PLC(可编程逻辑控制器)或其他设备,以实现数据传输和通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*C-Mode
- 站号:和PLC的站号保持一致。范围0-255
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:支持ABCD/CDAB/DCBA/BADC
- 字符串反转:支持AB/BA,例如字符串“1234”如果反转成BA后为“2143”
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:TIM0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*C-Mode over TCP
OMRON(欧姆龙)工业自动化设备使用TCP/IP网络进行通信时所采用的C-Mode通信协议。在这种情况下,C-Mode通信协议的数据包被封装在TCP/IP数据包中,通过TCP/IP网络进行传输。这种通信方式使得OMRON设备能够通过网络进行远程监控、控制和数据交换。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*C-Mode over TCP
- 站号:和PLC的站号保持一致。范围0-255
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:支持ABCD/CDAB/DCBA/BADC
- 字符串反转:支持AB/BA,例如字符串“1234”如果反转成BA后为“2143”
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:TIM0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
EtherNet/IP (CompactLogix)
EtherNet/IP是基于以太网的工业通信协议,它允许设备之间实现实时数据交换和通信。CompactLogix PLC通过Ethernet接口支持EtherNet/IP协议,这使得它们可以与其他支持相同协议的设备(如HMI、SCADA系统、驱动器等)进行通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择EtherNet/IP (CompactLogix)
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:A1。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
EtherNet/IP (Unconnected)
在EtherNet/IP中,Unconnected方式允许设备之间以无连接的方式进行数据通信。这意味着发送方可以直接向接收方发送数据,而无需事先建立连接。每条消息都包含目标设备的标识符以及要传输的数据,接收方接收到消息后可以立即处理。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择EtherNet/IP (Unconnected)
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 槽号:PLC槽号
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:A1。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- BCD16:16位BCD码
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
FINS TCP
FINS是欧姆龙(Omron)工业自动化设备使用的一种通信协议。它是用于在欧姆龙设备之间进行通信的协议,包括PLC(可编程逻辑控制器)、HMI(人机界面)等。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择FINS TCP
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 单元号:PLC单元号,默认是0
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:支持ABCD/CDAB/DCBA/BADC
- 字符串反转:支持AB/BA,例如字符串“1234”如果反转成BA后为“2143”
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:支持
- D:用于访问数据寄存器,存储整数值的地址类型
- C:用于访问控制寄存器,存储控制信息的地址类型,
- W:用于访问链接寄存器,存储指令地址的地址类型,
- H:用于访问高速计时器/计数器的地址类型,用于高速计时和计数,
- A:用于访问辅助继电器,即逻辑功能元件,
- E0-EF:访问扩展寄存器,扩展了PLC的地址空间。
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
FINS UDP
FINS(Factory Interface Network Service)是欧姆龙(Omron)工业自动化设备之间通信的一种协议。相比于FINS TCP,FINS UDP则是使用用户数据报协议(UDP)作为传输层的一种通信方式。UDP是一种无连接的、不可靠的传输协议,与TCP不同,它不建立连接,也不保证数据的可靠性和顺序性。FINS UDP允许设备之间通过UDP协议进行通信,适用于一些对实时性要求较高、但对数据的可靠性要求相对较低的应用场景。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择FINS UDP
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 单元号:PLC单元号,默认是0
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:支持ABCD/CDAB/DCBA/BADC
- 字符串反转:支持AB/BA,例如字符串“1234”如果反转成BA后为“2143”
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:支持
- D:用于访问数据寄存器,存储整数值的地址类型
- C:用于访问控制寄存器,存储控制信息的地址类型,
- W:用于访问链接寄存器,存储指令地址的地址类型,
- H:用于访问高速计时器/计数器的地址类型,用于高速计时和计数,
- A:用于访问辅助继电器,即逻辑功能元件,
- E0-EF:访问扩展寄存器,扩展了PLC的地址空间。
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
HostLink
HostLink是欧姆龙(Omron)工业自动化设备中常见的一种串行通信协议。它是一种用于连接欧姆龙PLC(可编程逻辑控制器)和其他设备(如PC、HMI等)之间的通信协议。HostLink协议通常通过串行接口(如RS-232、RS-422或RS-485)进行通信。它定义了通信的数据格式、传输协议和通信规范,以确保设备之间的兼容性和稳定性。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择HostLink
- 站号:和设备保持一致。范围:0-255
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:支持ABCD/CDAB/DCBA/BADC
- 字符串反转:支持AB/BA,例如字符串“1234”如果反转成BA后为“2143”
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:支持
- D:用于访问数据寄存器,存储整数值的地址类型
- C:用于访问控制寄存器,存储控制信息的地址类型,
- W:用于访问链接寄存器,存储指令地址的地址类型,
- H:用于访问高速计时器/计数器的地址类型,用于高速计时和计数,
- A:用于访问辅助继电器,即逻辑功能元件,
- E0-EF:访问扩展寄存器,扩展了PLC的地址空间。
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*HostLink over TCP
HostLink over TCP 是指在 TCP/IP 网络上模拟 HostLink 协议进行通信。通常情况下,HostLink 是通过串行通信进行的,但是通过将 HostLink 数据包封装在 TCP 数据包中,可以实现在 TCP/IP 网络上进行 HostLink 通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*HostLink over TCP
- 站号:和设备保持一致。范围:0-255
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:支持ABCD/CDAB/DCBA/BADC
- 字符串反转:支持AB/BA,例如字符串“1234”如果反转成BA后为“2143”
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。地址示例:TIM0。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
OPC
OPC DA
OPC DA 指的是 "OPC Data Access",是一种用于实现实时数据通信和交换的通信规范。它是基于微软的 COM/DCOM 技术(Component Object Model/Distributed Component Object Model)开发的,旨在提供一种标准化的方法,使得不同厂商的工业自动化设备能够与 OPC DA 兼容的软件进行数据交换。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择OPC DA
- IP地址:设备的IP地址
- 服务器名称:在安装和配置该服务器定义的服务器名称
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 启用组包上报:启用该功能的控制器下的测点可以配置为单独的轮询周期(毫秒级)。在测点配置中启用了“组包上报”的测点按照设定的轮询周期和次数采集数据,并将多次采集的数据组包发布到本地的MQTT主题“ds2/eventbus/south/upload/msec/data/{controllerName}”上。可以在“自定义快函数”页面添加模式为“本地订阅消息触发”的快函数订阅该主题,在快函数中对组包数据进行处理。
- 组包数据轮询周期:组包数据的轮询周期。
- 组包数据上报轮询次数:组包数据的轮询多少次后,统一上报。
- 启用批量采集:是否对控制器下的测点进行批量采集,如modbus协议中,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
OPC UA
OPC UA 是一种面向工业自动化的机器到机器通信协议,由 OPC 基金会开发维护。OPC UA 提供一种标准化的方式, 使不同的设备和系统能够互相通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择OPC UA
- 服务器URL:填写服务器地址加端口,例如:192.168.2.1:4801
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 认证方式:支持匿名登录,用户名密码,认证证书三种方式。默认是匿名登录。
- 安全策略:确保通信安全性的一组规则和机制。用来保护在 OPC UA 客户端和服务器之间传输的数据免受未经授权的访问和篡改。支持的模式有:None、自动检测、Basic128Rsa15、Basic256、Basic256Sha256、Aes128Sha256RsaOaep
- 消息安全模式(注:当安全策略为None时,消息安全模式只能为None;当安全策略为自动检测时,安全模式三种都可以选择;其余安全策略时,消息安全模式在签名、签名和加密两项中选择)
- 描述:可以对该控制器添加注释信息
- 启用组包上报:启用该功能的控制器下的测点可以配置为单独的轮询周期(毫秒级)。在测点配置中启用了“组包上报”的测点按照设定的轮询周期和次数采集数据,并将多次采集的数据组包发布到本地的MQTT主题“ds2/eventbus/south/upload/msec/data/{controllerName}”上。可以在“自定义快函数”页面添加模式为“本地订阅消息触发”的快函数订阅该主题,在快函数中对组包数据进行处理。
- 组包数据轮询周期:组包数据的轮询周期。
- 组包数据上报轮询次数:组包数据的轮询多少次后,统一上报。
- 启用批量采集:是否对控制器下的测点进行批量采集,如modbus协议中,开启批量采集后,会在一次读取请求中读取所有地址连续的测点,可以有效提升采集效率。
- 最大批量采集数:启用批量采集后,需要配置最大允许一次采集的测点个数。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- NS(命名空间索引):一个用于标识和区分不同命名空间的整数值,范围0-65535
- 地址类型:支持String和Number
- 识别码:如果地址类型是String,可以填写任意字符串;如果是Number,则支持整数值
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 是否数组:如果测点是是数组类型启用该功能。
- 数组索引:代表当前测点在该数组中位置,例如第一个元素是索引是0,第二个元素索引时1,以此类推。
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
*OPC UA PUBSUB
OPC UA PUBSUB 是 OPC UA(OPC Unified Architecture)中的一种通信机制,全称为 "OPC UA Publisher/Subscriber"。它是一种基于发布/订阅模式的通信方式,用于在工业自动化系统中实现实时数据的发布和订阅。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*OPC UA PUBSUB
- 中间件:选择OPCUA PUBSUB使用的协议,只支持UDP
- 发布地址:发送数据的目标地址
- 订阅地址:接收数据的目标地址
- 发布者ID:标识发布者的唯一标识符,无符号32位的整数
- 订阅者ID:标识订阅者的唯一标识符,无符号32位的整数
- 状态过期时间:指定时间内控制器或测点未收到新消息时,状态将自动更新为离线
- 服务器端口号:opcua pubsub启用的服务器的端口信息,注意不能于其他服务使用同一端口
- 描述:可以对该控制器添加注释信息
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 订阅分组ID:与发布侧的该测点发布分组ID保持一致,范围1-65535
- 订阅写入ID:与发布侧的该测点发布写入ID保持一致,范围1-65535
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 是否数组:如果测点是是数组类型启用该功能。
- 数组索引:代表当前测点在该数组中位置,例如第一个元素是索引是0,第二个元素索引时1,以此类推。
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 发布分组ID:该测点属于的发布分组ID,范围:1-65535
- 发布写入ID:该测点属于的发布写入ID,范围:1-65535
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Panasonic(松下)
Mewtocol
Panasonic(松下)的Mewtocol是一种专有的通信协议,用于Panasonic工业自动化设备之间的通信。Mewtocol通常用于连接Panasonic的PLC以实现设备之间的数据传输和控制。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Mewtocol
- 站号:设备标识符
- 通讯方式:支持RS232和RS485,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:从下拉框中选择
- 地址:测点地址。
- 数据类型:根据不同的地址类型,数据类型也不同,具体支持的数据类型,选择地址类型后,从下拉框中选择
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*Mewtocol over TCP
Panasonic(松下)工业自动化设备使用TCP/IP网络传输Mewtocol通信协议的一种方式。通常情况下,Mewtocol协议是基于串行通信(如RS-232、RS-485等)设计的,但通过Mewtocol over TCP,可以通过TCP/IP网络将Mewtocol数据封装在TCP数据包中进行传输。这种通信方式允许Panasonic设备之间通过标准的TCP/IP网络进行通信,从而实现远程监控、控制和数据传输。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*Mewtocol over TCP
- 站号:设备的唯一标识符
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*Panasonic MC 3E
Panasonic MC 3E是Panasonic(松下)公司生产的一款PLC(可编程逻辑控制器)产品系列。这些PLC通常用于工业自动化和控制系统中,以执行各种控制任务,如逻辑控制、数据处理、运动控制等。它们通常支持多种通信接口和通信协议,以便于与其他设备进行数据交换和通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*Panasonic MC 3E
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
SIEMENS(西门子)
*Fetch/Write
"Fetch/Write" 是指在工业自动化领域中常见的一种数据交换操作。它通常用于描述从控制设备(例如 PLC、传感器等)中获取数据(Fetch)和向控制设备写入数据(Write)的过程。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*Fetch/Write
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。示例:I1.6、Q1
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- BCD16:16位BCD码
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
ISO on TCP
"ISO on TCP" 是指在 TCP/IP 网络上使用 ISO(国际标准化组织)定义的一系列标准进行通信。ISO 是一个国际标准制定组织,负责制定各种行业的标准,包括信息技术、通信、制造等领域。
在工业自动化领域,ISO 提供了许多与通信和数据交换相关的标准,其中一些标准可以应用于 TCP/IP 网络上。这些标准通常涵盖了数据交换协议、通信接口、数据格式等方面的规范,以便不同设备和系统之间能够进行数据交换和通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择ISO on TCP
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 模式:支持两种,分别是Rack/Slot和TSAP
- Rack/Slot:
- 机架号:PLC的机架号
- 槽号:PLC的槽号信息
- TSAP:
- 客户端TSAP:通常包括Rack号、Slot号以及具体的TSAP地址
- 服务端TSAP:通常包括Rack号、Slot号以及具体的TSAP地址
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 启用组包上报:启用该功能的控制器下的测点可以配置为单独的轮询周期(毫秒级)。在测点配置中启用了“组包上报”的测点按照设定的轮询周期和次数采集数据,并将多次采集的数据组包发布到本地的MQTT主题“ds2/eventbus/south/upload/msec/data/{controllerName}”上。可以在“自定义快函数”页面添加模式为“本地订阅消息触发”的快函数订阅该主题,在快函数中对组包数据进行处理。
- 组包数据轮询周期:组包数据的轮询周期。
- 组包数据上报轮询次数:组包数据的轮询多少次后,统一上报。
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:
- Rack/Slot模式:
- I:输入寄存器
- Q:输出寄存器
- M:内部寄存器
- DB:数据寄存器
- TSAP模式:
- I:输入寄存器
- Q:输出寄存器
- M:内部寄存器
- V:数据寄存器
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- BCD16:16位BCD码
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
PPI
PPI(Point-to-Point Interface)是西门子(Siemens)公司开发的一种串行通信接口协议,用于连接西门子 S7 系列可编程逻辑控制器(PLC)及其外围设备。PPI 主要用于简单的数据传输和通信任务,例如连接 HMI(Human-Machine Interface,人机界面)、编程设备和其他外部设备。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择PPI
- 从站地址:和设备保持一致,范围0-255
- 通讯方式:支持RS485和RS232,默认RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址类型:
- I:输入寄存器
- Q:输出寄存器
- M:内部寄存器
- V:数据寄存器
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- BCD16:16位BCD码
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
*PPI over TCP
"PPI over TCP" 指的是通过 TCP/IP 网络传输 PPI(Point-to-Point Interface)数据的通信方式。在传统的工业自动化系统中,PPI 通常通过串行接口(如 RS485)与西门子 S7 系列可编程逻辑控制器(PLC)及其外围设备进行连接。然而,随着工业网络的发展,越来越多的应用开始使用 TCP/IP 网络来替代传统的串行连接,从而实现远程访问和数据交换。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*PPI over TCP
- 站号:设备站号,范围0-255
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。示例:I1、Q1
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- BCD16:16位BCD码
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
- 组包上报:控制器启用组包上报后可见该字段。测点启用后,除了按照分组上报数据外还会按照控制器设定的组包上报逻辑上报数据
*WebApi
西门子的 Web API(Web Application Programming Interface)是一种基于 HTTP 协议的接口,用于与西门子的工业自动化设备和系统进行通信和数据交换。它允许开发人员通过网络连接来访问和操作西门子设备上的数据和功能,从而实现自动化系统的监控、控制和集成。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*WebApi
- IP地址:设备的IP地址
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。示例:I1、Q1
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号数
- SINT:8位有符号数
- BCD16:16位BCD码
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- ULONG:64位无符号整数
- LONG:64位有符号整数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
VIGOR(丰炜)
*VIGOR Serial
丰炜(VIGOR)工业自动化设备所使用的串行通信协议。这种协议通常用于连接丰炜的PLC(可编程逻辑控制器)或其他设备,以实现设备之间的数据传输和通信。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*VIGOR Serial
- 站号:设备标识符
- 通讯方式:支持RS232和RS485,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*VIGOR Serial over TCP
丰炜(VIGOR)工业自动化设备所使用的一种串行通信协议通过TCP/IP网络进行传输的方式。这种协议允许将原本通过串行通信(例如RS-232、RS-485等)进行的数据传输,通过TCP/IP网络进行转换和传输。通过网络实现设备之间的远程监控、控制和数据交换,使得工业自动化系统更加灵活和便捷。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*VIGOR Serial over Serial
- 站号:设备标识符
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
XINJE(信捷)
*XINJE TCP(专用)
信捷(XINJE)工业自动化设备使用的专有TCP/IP通信协议。这种协议是由信捷公司开发的专门用于其设备之间通信的协议
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*XINJE TCP(专用)
- 站号:设备标识符
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- PLC类型:PLC系列,支持XC,XD,XL
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:从下拉框中选择
- 字符串:从下拉框中选择
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*XINJE TCP(Modbus)
XINJE TCP(Modbus)是指信捷(XINJE)工业自动化设备所使用的基于Modbus协议的TCP/IP通信方式。Modbus是一种常见的工业通信协议,用于在工业控制系统中实现设备之间的数据传输和通信。通过XINJE TCP(Modbus),信捷设备可以通过TCP/IP网络与其他设备进行通信。这种通信方式提供了一种可靠的、实时的数据交换机制,使得用户可以远程监控、控制和管理信捷设备,实现工业自动化系统的各种功能,如数据采集、远程控制、故障诊断等。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*XINJE TCP(Modbus)
- 站号:设备标识符
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- PLC类型:PLC系列,支持XC,XD,XL
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:从下拉框中选择
- 字符串:从下拉框中选择
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*XINJE Serial
XINJE Serial是指信捷(XINJE)工业自动化设备所使用的串行通信协议。这种协议通常用于连接信捷的PLC(可编程逻辑控制器)、HMI(人机界面)或其他设备,以实现设备之间的数据传输和通信。XINJE Serial协议通常包括一系列通信规范和数据格式,用于确保不同设备之间的兼容性和稳定性。通过XINJE Serial,用户可以实现对信捷设备的监控、控制和数据采集等功能。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*XINJE Serial
- 站号:设备标识符
- 通讯方式:支持RS232和RS485,默认使用RS485
- PLC类型:PLC系列,支持XC,XD,XL
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:从下拉框中选择
- 字符串:从下拉框中选择
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
*XINJE Serial over TCP
用于连接信捷工业自动化设备的串行接口到TCP/IP网络。这种协议允许将串行通信通过TCP/IP网络传输,使得设备可以通过网络进行远程监控和控制。通常情况下,这种协议允许通过网络连接到信捷的PLC(可编程逻辑控制器)或HMI(人机界面)设备,以实现远程访问、数据采集和控制等功能。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*XINJE Serial over TCP
- 站号:设备标识符
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- PLC类型:PLC系列,支持XC,XD,XL
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 字节序:
- 32位整数:从下拉框中选择
- 字符串:从下拉框中选择
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Yokogawa(横河)
*Link TCP
用于连接Yokogawa工业自动化设备的一种通信协议。它是一种基于TCP/IP网络的通信协议,用于在工业控制系统中实现设备之间的数据传输和通信。通过Link TCP,Yokogawa设备可以与其他设备进行数据交换,实现实时监控、控制和数据采集等功能。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择*Link TCP
- 站号:设备标识符
- IP地址:设备的IP地址信息
- 端口号:设备的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
高级设置:
- 超时时间设置:
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 连接超时时间:建立连接的超时时间。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 地址:测点地址。
- 数据类型:测点数据类型,包括:
- BIT:0或1
- BYTE:8位无符号整数
- SINT:8位有符号整数
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- BCD16:16位BCD码
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
简单驱动协议
工业自动化的一大显著特征是“碎片化”。这一特征给数字化工作带来了很多的工作量和障碍。工业行业中,有这么一类设备:
型号数量众多;
单一设备(从通信角度看)功能相对简单,数据(测点)数量少,需要的读写取指令不多;
通信协议是问答型的,即“请求--响应”模型;
每个型号都有自己独特的通信协议,通常都是对二进制字节的相对简单的解析;
报文长度一般在100字节以内,工程师理解解析相对简单;
简单驱动协议是一种通用的数采协议,可以解决上述问题的通用协议。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Easy COM
- 通讯方式:支持RS485和RS232,默认使用RS485
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
指令集:
- 读取数据:默认是启用的
- 读取指令:十六进制定长请求报文,报文中的动态数据部分需使用00填充
- 响应长度:响应报文的长度
- 响应头部检查:
- 头部长度:报文头部的字节长度
- 期望头部:期望报文的头部十六进制值
- 响应校验和检查:
- 起始字节地址:起始的校验的内容在报文中的第几个字节
- 校验字节长度:校验内容的长度
- 校验方式:支持CRC16、SUN16、SUM8,默认使用CRC16
- 校验字节序:支持“与控制器一致”和“与控制器相反”。如果校验方式选择SUM8,则没有这个配置项。控制器的字节序在高级设置里配置
写入数据:
- 写入指令:十六进制定长请求报文,报文中的动态数据部分需使用00填充
- 添加写入校验位:
- 校验方式:支持CRC16、SUN16、SUM8,默认使用CRC16
- 校验起始字节:从第几个字节开始进行计算校验值
- 校验字节长度:从校验起始字节开始校验的字节数
- 校验字节序:支持“与控制器一致”和“与控制器相反”。如果校验方式选择SUM8,则没有这个配置项。控制器的字节序在高级设置里配置
- 响应长度:写入数据后,响应报文的长度。范围1-256字节
- 响应头部检查:
- 头部长度:报文头部的长度
- 期望头部:期望报文的头部十六进制值
- 响应校验和检查:
- 起始字节地址:起始的校验的内容在报文中的第几个字节
- 校验字节长度:校验内容的长度
- 校验方式:支持CRC16、SUN16、SUM8,默认使用CRC16
- 校验字节序:支持“与控制器一致”和“与控制器相反”。如果校验方式选择SUM8,则没有这个配置项。控制器的字节序在高级设置里配置
高级设置:
- 字节序:支持两种,分别是“高字节在前”和“低字节在前”
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 测点字节序:支持“与控制器一致”和“与控制器相反”。控制器的字节序在高级设置里配置
- 解析方式:支持“HEX2DEC(16进制转10进制)”,“BCD2DEC(BCD码转10进制)”,“IEEE754(标准浮点数)”,“数据减33H后取BCD”,“数据减33H后取HEX”,“数据减33H后取ASCII”
- 数据类型:测点数据类型,包括:
- BYTE:8位无符号数
- SINT:8位有符号数
- BCD16:16位BCD码
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 起始读取字节:当前测点在报文中的起始地址。报文首字节的地址为0,以此类推。
- 读取字节长度:当前测点在报文中的字节长度
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
Easy TCP
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择Easy TCP
- IP地址:通信对端IP地址
- 端口号:通信对端的端口信息
- 轮询周期:为采集数据的时间间隔(秒级),例如设置为10S,则每10S轮询一次该控制器下所有测点
- 启用多轮询周期:启用后,可以额外配置一个轮询周期并选择控制器下的某些测点使用该轮询周期。该功能可用于区分需要高频和低频采集的测点,高效利用网关和PLC性能。
- 轮询周期2:即启用多轮询周期后,需要设置的额外的轮询周期(秒级)
- 描述:可以对该控制器添加注释信息
指令集:
- 读取数据:默认是启用的
- 读取指令:十六进制定长请求报文,报文中的动态数据部分需使用00填充
- 响应长度:响应报文的长度
- 响应头部检查:
- 头部长度:报文头部的字节长度
- 期望头部:期望报文的头部十六进制值
- 响应校验和检查:
- 起始字节地址:起始的校验的内容在报文中的第几个字节
- 校验字节长度:校验内容的长度
- 校验方式:支持CRC16、SUN16、SUM8,默认使用CRC16
- 校验字节序:支持“与控制器一致”和“与控制器相反”。如果校验方式选择SUM8,则没有这个配置项。控制器的字节序在高级设置里配置
写入数据:
- 写入指令:十六进制定长请求报文,报文中的动态数据部分需使用00填充
- 添加写入校验位:
- 校验方式:支持CRC16、SUN16、SUM8,默认使用CRC16
- 校验起始字节:从第几个字节开始进行计算校验值
- 校验字节长度:从校验起始字节开始校验的字节数
- 校验字节序:支持“与控制器一致”和“与控制器相反”。如果校验方式选择SUM8,则没有这个配置项。控制器的字节序在高级设置里配置
- 响应长度:写入数据后,响应报文的长度。范围1-256字节
- 响应头部检查:
- 头部长度:报文头部的长度
- 期望头部:期望报文的头部十六进制值
- 响应校验和检查:
- 起始字节地址:起始的校验的内容在报文中的第几个字节
- 校验字节长度:校验内容的长度
- 校验方式:支持CRC16、SUN16、SUM8,默认使用CRC16
- 校验字节序:支持“与控制器一致”和“与控制器相反”。如果校验方式选择SUM8,则没有这个配置项。控制器的字节序在高级设置里配置
高级设置:
- 字节序:支持两种,分别是“高字节在前”和“低字节在前”
- 采集超时时间:在采集测点时,对设备发起读取请求后,设备响应的超时时间,如果在设置的采集超时时间内,设备没有响应读取请求,则仍为本次采集失败。
- 通讯时间设置:
- 通讯间隔时间:报文交互的间隔时间,即收到设备响应后,会等待一个通讯间隔时间后再发送下一次的请求报文。
- 通讯报文设置:
- 存储通讯报文:启用该功能的控制器会存储通讯报文,存储路径和条数可在“参数设置”页面的“默认参数”中设置。如需下载存储的通讯报文,可在“测点监控”页面进入指定控制器的“实时通讯报文”页面,点击“下载”按钮下载。
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 测点字节序:支持“与控制器一致”和“与控制器相反”。控制器的字节序在高级设置里配置
- 解析方式:支持“HEX2DEC(16进制转10进制)”,“BCD2DEC(BCD码转10进制)”,“IEEE754(标准浮点数)”,“数据减33H后取BCD”,“数据减33H后取HEX”,“数据减33H后取ASCII”
- 数据类型:测点数据类型,包括:
- BYTE:8位无符号数
- SINT:8位有符号数
- BCD16:16位BCD码
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- Write:只写,不读
- 起始读取字节:当前测点在报文中的起始地址。报文首字节的地址为0,以此类推。
- 读取字节长度:当前测点在报文中的字节长度
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
虚拟控制器
虚拟控制器主要是网关设计用于二次开发设备采集的数据显示控制器。二次开发的App采集的数据可以通过内部MQTT消息总线将采集的数据传给网关内部,并通过调用写控制器测点值的脚本API将数据显示在虚拟控制器的测点中。
添加控制器
- 名称:控制器的名称,在整个网关的控制器列表中唯一
- 控制器协议:选择虚拟控制器
- 状态过期时间:如果设置为大于0,则在指定时间内虚拟控制器或测点的未收到新消息时,状态将自动更新为离线;如果等于0,则控制器在线过后永远不会显示离线。
- 描述:可以对该控制器添加注释信息
添加测点
- 测点名称:测点的名称(同一控制器下测点名称不能重复)
- 数据类型:测点数据类型,包括:
- BYTE:8位无符号数
- SINT:8位有符号数
- BCD16:16位BCD码
- WORD:16位无符号整数
- INT:16位有符号整数
- DWORD:32位无符号整数
- DINT:32位有符号整数
- FLOAT:32位浮点数
- DOUBLE:64位浮点数
- STRING:8位字符串
- 小数位:数据类型为FLOAT或DOUBLE时测点小数点后的数据长度,最大6位
- 长度:数据类型为STRING时字符串长度
- 字符串编码格式:ASCII、UTF-8、UTF-16小端、UTF-16大端、GB2312
- 。仅数据类型选择STRING有效。
- 按位取值:启用后可以读取整数中的任意位数据的值。
- 位:开启按位取值后,读取位数据时测点的位偏移。
- 取反:开启按位取值后,可以选择是否将读取的结果取反。
- 数值映射:启用后将BIT型测点的0和1值映射为False和True
- 读写权限:
- Read:只读,不可写
- Read/Write:可读可写
- 上传模式:
- Periodic:按照所属分组的上报周期定时上报数据
- Onchange:测点数值有变化时才按照分组的上报周期定时上报数据
- Never:仅在本地使用,不需要上传云端的数据
- 变化死区:上传模式为Onchange时,可以设置数值变化在一定范围内视为数值无变化。如果数据有配置数据运算,则按照运算后的数值检测数值变化是否超过死区。
- 单位:测点单位
- 描述:测点描述
- 所属分组:测点所属分组
- 存储历史数据:启用后将以测点所属分组名称生成历史数据表,按照分组所设置的存储策略存储历史数据。存储的历史数据可导出为CSV文件或调用Python API获取。
- 数据运算:测点数据类型非BIT和STRING型时支持通过数据运算进行简单的运算处理,处理后的数据值可以上报至云平台。映射到协议转换中(Modbus Slave或OPC UA Server等)的数值默认为采集的原始数据值而不是运算后的数据值
- 无:不进行运算,使用采集的原始数据值
- 比例运算:将采集的数据值按数据上下限范围等比例映射到比例上下限范围中的某个数据值,如将传感器中采集到的数据映射为实际的温湿度。计算公式为计算后的数据值=(比例上限-比例下限)/(数据上限-数据下限)*(原始数据值-数据下限)+比例下限
- 小数位:运算后需要保留的小数位
- 数据上限:测点的数据上限值
- 数据下限:测点的数据下限值
- 比例上限:比例运算后的数据上限值
- 比例下限:比例运算后的数据下限值
- 偏移及缩放:按照倍率和偏移量计算原始数据值,公式为计算后的数据值=(原始数据值*倍率)+偏移量
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- 位截取:截取原始数据中的一段位数据作为数据值。FLOAT型测点不支持此操作
- 起始位:开始截取原始数据的位偏移
- 结束位:结束截取原始数据的位偏移
- PT/CT:按照倍率、偏移量、PT和CT计算原始数据值,公式为[(原始值*倍率)+偏移量]*PT*CT
- 小数位:运算后需要保留的小数位
- 倍率:需要放大或缩小的倍率
- 偏移量:倍率运算后需要增加或减少的数据值
- PT:额外的PT倍率
- CT:额外的CT倍率
- 数值映射:可配置测点的特定数值转换为其他数值。
- 原始值:采集到的原始测点数值。
- 映射值:期望转换后的测点数值。
附录:协议转换
Modbus TCP Slave
Modbus TCP Slave配置
在Modbus TCP Slave的配置页面,启用Modbus TCP Slave,界面如下图所示:
Modbus TCP Slave配置界面参数说明:
- 端口号:modbus TCP的端口号,支持1-65535,默认是502。
- 16位整数字节序:网关固定是AB字节序
- 32位整数字节序:网关固定是ABCD字节序
- 32位浮点数字节序:网关固定是ABCD字节序
- 64位整数字节序:网关固定是ABCDEFGH字节序
- 最大连接数:支持1-32,默认是5个连接。
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
配置好Modbus TCP Slave参数后,点击“提交”按钮即可启用Modbus TCP Slave功能。在Modbus TCP Slave的状态”页面,可以查看运行状态和连接的设备信息。
配置Modbus TCP Slave映射表
点击“添加”按钮在弹出的界面中,可以配置一个不同的从站地址的映射表(注:映射表名称和从站地址是不可重复的)
如图是添加一个名称为2,从站地址为2的Modbus映射表
添加成功后,界面显示如图所示:
点击“编辑”按钮,可以对当前页面的映射表修改从站地址。当页面的映射表数量大于2时,点击“删除”按钮可以对映射表进行删除操作。下图所示是删除映射表2:
下图是添加测点到Modbus TCP Slave映射表:
添加映射的参数说明:
- 控制器:南向控制器设备
- 测点:南向控制器中的测点
- 读写权限:与南向控制器中该测点的读写权限保持一致(不可修改)
- 原始数据类型:与南向控制器中该测点的数据类型保持一致(不可修改)
- 映射数据类型:该测点在Modbus TCP Slave中的数据类型
- 起始映射地址:该测点在Modbus TCP Slave中的寄存器起始地址
- 映射地址:根据起始映射地址和数据类型自动计算并显示。
下图是批量添加测点到Modbus TCP Slave映射表:
批量添加映射参数介绍:
- 起始映射地址:当前选中的测点在Modbus TCP Slave中的寄存器起始地址
- 映射地址:根据起始映射地址、勾选的测点和测点的数据类型计算显示当前添加的测点映射地址范围
- 映射数据类型:可以配置当前测点在Modbus TCP Slave中的数据类型。
IEC 104 Server
IEC 104 Server配置
IEC 104 Server的配置页面,启用IEC 104 Server后,界面如下图所示:
IEC 104 Server配置界面参数说明:
- COT长度:传输原因字节长度,COT字段用于标识传送原因。支持1和2,默认是2
- ASDU长度:应用服务数据单元的长度,即CA公共地址的长度,ASDU字段用于区分此链路上不同的子站。支持1和2,默认是2
- 连接模式:
- TCP服务器:
- 端口号:配置TCP服务器的端口
- TCP客户端:
- 服务器IP地址/域名:配置为客户端模式,想要连接的TCP服务器地址或域名
- 端口号:服务器的端口
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
- Server列表:一般情况下,链路地址域的站地址和应用服务数据单元(ASDU)公共地址可以使同一个值。在某些情况下,在一个链路层地址域的站地址下,可以有好几个应用服务数据单元公共地址,如:一个变电所搜集附近几个卫星站的信息,然后向主站传送。此时在应用服务数据单元公共地址可以有好几个。此时就可以在这里添加多个Server表示多个子站。下图是添加一个ASDU地址为2的例子(注:地址不可重复):
如果Server列表中的序号大于2,那么可以删除不需要的ASDU地址。下图是删除一个序号1的ASDU地址:
高级设置:
- 启用自发上报:启用后,从站将主动向主站发送数据
- K值:未被确认的I格式(信息)APDU(k)最大数目。范围1-32,默认12。
- W值:接收方收到w个I格式(信息)APDU后确认,范围1-32,默认8。
- T0超时(S):T0超时是主站在发送启动帧后等待从站响应的超时时间。如果在T0超时时间内没有收到从站的响应帧,主站将认为通信失败并进行相应的处理。范围1-3000,默认是30,单位是秒。
- T1超时(S):t1规定发送方发送一个I格式报文或U格式(控制)报文后,必须在t1的时间内得到接收方的认可,否则发送方认为TCP连接出现问题并应重新建立连接。范围1-3000,默认是15,单位是秒。
- T2超时(S):t2规定接收方在接收到I格式报文后,若经过t2时间未再收到新的I格式报文,则必须向发送方发送S格式(监控)帧对已经接收到的I格式报文进行认可。范围1-3000,默认是10,单位是秒。注:T2 < T1
- T3超时(S):t3规定调度端或子站RTU端每接收一帧I帧、S帧或者U帧将重新触发计时器t3,若在t3内未接收到任何报文,将向对方发送测试链路帧。范围1-3000,默认是20,单位是秒。注:T3 > T1
- 最大连接数:支持1-32,默认是5
- 时间设置:只支持本地时间
- 字节序:固定是ABCD
配置好IEC 104 Server参数后,点击“提交”按钮即可启用IEC 104 Server功能。在IEC 104 Server 的状态页面,可以查看运行状态和连接的设备信息。
配置IEC 104 Server映射表
下图是添加测点到IEC 104 Server映射表(注:只读测点只能映射一次,读写测点可以映射两次):
添加映射参数介绍:
- 控制器:南向控制器设备
- 测点:南向控制器中的测点
- 读写权限:与南向控制器中该测点的读写权限保持一致(不可修改)
- 原始数据类型:与南向控制器中该测点的数据类型保持一致(不可修改)
- 类型ID:根据测点类型显示支持的类型ID
Single-Point Information(只读或读写测点均可,支持的测点类型:BIT):
[1] M_SP_NA_1
[30] M_SP_TB_1
Double-Point Information(只读或读写测点均可,支持的测点类型:除BIT,FLOAT和STRING以外的所有测点类型):
[3] M_DP_NA_1
[31] M_DP_TB_1
Step Position Information(只读或读写测点均可,支持的测点类型为BYTE,SINT):
[5] M_ST_NA_1
[32] M_ST_TB_1
Bitstring(32bit)(只读或读写测点均可,支持的测点类型:BYTE,SINT,WORD,INT,DWORD,DINT,BCD):
[7] M_BO_NA_1
[33] M_BO_TB_1
Measured Value(Normalized)(只读或读写测点均可,支持的测点类型:BYTE,SINT,WORD,INT,DWORD,DINT,FLOAT,BCD):
[9] M_ME_NA_1
[21] M_ME_ND_1
[34] M_ME_TD_1
Measured Value(Scaled)(只读或读写测点均可,支持的测点类型:BYTE,SINT,WORD,INT,BCD):
[11] M_ME_NB_1
[35] M_ME_TE_1
Measured Value(Short Float)(只读或读写测点均可,支持的测点类型:BYTE,SINT,WORD,INT,DWORD,DINT,FLOAT,BCD):
[13] M_ME_NC_1
[36] M_ME_TF_1
Integrated Totals(只读或读写测点均可,支持的测点类型:BYTE,SINT,WORD,INT,DWORD,DINT,BCD):
[15] M_IT_NA_1
[37] M_IT_TB_1
Parameter(只读或读写测点均可,支持的测点类型:BYTE,SINT,WORD,INT,DWORD,DINT,FLOAT,BCD):
[110] P_ME_NA_1
[111] P_ME_NB_1
[112] P_ME_NC_1
Single Command(仅支持读写测点,支持的测点类型:BIT):
[45] C_SC_NA_1:单个遥控命令
[58] C_SC_TA_1:带时间标签的单个遥控命令。
Double Command(仅支持读写测点,支持的测点类型:除BIT,FLOAT和STRING以外的所有测点):
[46] C_DC_NA_1
[59] C_DC_TA_1
Regulating Step Command(仅支持读写测点,支持的测点类型:BYTE,SINT):
[47] C_RC_NA_1
[60] C_RC_TA_1
Set point command-Measured Value(Normalized) (仅支持读写测点,支持的测点类型:BYTE,SINT,WORD,INT,DWORD,DINT,FLOAT,BCD):
[48] C_SE_NA_1
[61] C_SE_TA_1
Set point command-Measured Value(Scaled)(仅支持读写测点,支持的测点类型:BYTE,SINT,WORD,INT,BCD):
[49] C_SE_NB_1
[62] C_SE_TB_1
Set point command-Measured Value(Short Float)(仅支持读写测点,支持的测点类型:BYTE,SINT,WORD,INT,DWORD,DINT,FLOAT,BCD):
[50] C_SE_NC_1
[63] C_SE_TC_1
Bitstring command(32bit)(仅支持读写测点,支持的测点类型:BYTE,SINT,WORD,INT,DWORD,DINT,BCD):
[51] C_BO_NA_1
[64] C_BO_TA_1
- 映射数据类型:映射在IEC 104 Server中的数据类型
- ASDU地址:在Server列表中的ASDU地址选择
- 起始IOA:标识通信传输中信息对象的地址。
- 映射地址:由类型ID和起始IOA值决定
下图是批量添加测点到IEC 104 Server映射表
批量添加映射界面参数介绍:
- ASDU地址:根据配置时的server列表里添加的ASDU地址选择
- 类型ID:根据类型ID显示支持的测点信息
具体类型请参考添加映射参数介绍中的类型ID。
- 起始IOA:起始映射地址
- 映射地址:根据起始映射地址计算显示当前添加的测点映射地址范围
- 映射数据类型:可以配置当前测点在IEC 104 Server中的数据类型。
OPCUA Server
OPCUA Server配置
在OPCUA Server 的配置页面,启用OPCUA Server后,界面如下图所示:
OPCUA Server配置界面参数说明:
- 端口号:OPCUA服务器的端口号,范围:1-65535
- 最大连接数:支持最大客户端连接数量,范围:1-32
- 匿名登陆:禁用匿名登录后,将展示“用户名”“密码”两个配置项
- 用户名:设置客户端连接所用的用户名
- 密码:设置客户端连接所用的密码
配置好用户名和密码后,客户端连接如果不输入正确的用户名密码将连接不上服务器。
- 服务器证书:导入后OPCUA服务器将对客户端进行证书密钥认证
- 服务器私钥:导入后OPCUA服务器将对客户端进行证书密钥认证
- 标识符类型:支持Numeric和String,默认使用String类型
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
配置好OPCUA Server参数后,点击“提交”按钮即可启用OPCUA Server功能。在OPCUA Server的状态页面,可以查看运行状态和连接的设备信息。
配置OPCUA Server映射表
下图是添加测点到OPCUA Server映射表:
- 映射数据类型:当前测点映射到 OPCUA Server中的数据类型
勾选想要添加到映射表中的测点最后点击“确认”就可以将测点添加至映射表中
Modbus RTU Slave
Modbus RTU Slave配置
在Modbus RTU Slave 的配置页面,启用Modbus RTU Slave后,界面如下图所示:
Modbus RTU Slave配置界面参数说明:
- 通讯方式:支持RS485和RS232,默认是RS485
- 波特率:可以在“参数设置”页面配置
- 数据位:可以在“参数设置”页面配置
- 校验位:可以在“参数设置”页面配置
- 停止位:可以在“参数设置”页面配置
- 16位整数字节序:网关固定是AB字节序
- 32位整数字节序:网关固定是ABCD字节序
- 32位浮点数字节序:网关固定是ABCD字节序
- 64位整数字节序:网关固定是ABCDEFGH字节序
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
配置好Modbus RTU Slave参数后,点击“提交”按钮即可启用Modbus RTU Slave功能。在Modbus RTU Slave 的状态页面,可以查看运行状态信息。
配置Modbus RTU Slave映射表
配置Modbus RTU Slave映射表可以参考配置Modbus TCP Slave映射表
IEC 101 Server
IEC 101 Server配置
在IEC 101 Server 的配置页面,启用IEC 101 Server后,界面如下图所示:
IEC 101 Server配置界面参数说明:
基本设置:
- 通讯方式:支持RS232,RS485,TCP透明传输
- 链路模式:支持非平衡式和平衡式,非平衡式仅支持同一时间通信双方一方发送数据,属于半双工,适用于RS485场景,平衡式可以支持通信双方同时发送数据,属于全双工,适用于RS232场景
- 协议版本:IEC60870-5-101和DL/T634.5101。IEC60870-5-101更适合国际上的电力自动化系统,DL/T634.5101适用于中国电力系统。
- 链路地址长度:支持1和2。链路层中用于表示设备地址的位数或字节数
- 链路地址:在链路层中用于标识通信设备的唯一标识符
- ASDU长度:应用服务数据单元的长度,即CA公共地址的长度,ASDU字段用于区分此链路上不同的子站。支持1和2,默认是2
- IOA长度:IOA的长度决定了监测点的数量和范围。支持1、2、3。默认是3
- COT长度:传输原因字节长度,COT字段用于标识传送原因,支持1、2。默认是2
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
- Server列表:一般情况下,链路地址域的站地址和应用服务数据单元(ASDU)公共地址可以使同一个值。在某些情况下,在一个链路层地址域的站地址下,可以有好几个应用服务数据单元公共地址,如:一个变电所搜集附近几个卫星站的信息,然后向主站传送。此时在应用服务数据单元公共地址可以有好几个。此时就可以在这里添加多个Server表示多个子站。下图是添加一个ASDU地址为2的例子(注:地址不可重复):
如果Server列表中的序号大于2,那么可以删除不需要的ASDU地址。(Server列表序号大于等于1),下图是删除一个序号1的ASDU地址:
如果通讯方式选择TCP透明传输参数说明:
- 心跳重试间隔:服务器发送心跳包并等待客户端响应的时间间隔。默认是10秒,范围1-3600
- 心跳重试次数:服务器在未收到客户端响应时尝试重新发送心跳包的次数。默认是5次,范围1-100
- 心跳最大空闲时间:服务器端在未收到客户端响应的情况下,允许连接保持空闲的最长时间。默认是100秒,范围1-65535
- 串口缓存帧个数:系统缓存接收到的数据帧的数量。默认是4个。范围1-4
- 串口分帧长度:在串口通信中,每个数据帧的长度。默认是1024,支持1-1024字节
- 串口分帧间隔:在串口通信中,每个数据帧之间的时间间隔。默认是100毫秒,支持10-65535毫秒
- 最小重连间隔:在断开连接后重新连接的最短时间间隔。默认15秒,支持15-60秒。
- 最大重连间隔:在断开连接后重新连接的最长时间间隔。默认15秒,支持15-3600秒
- 多中心策略:在系统中使用多个数据中心(或服务器中心)来处理TCP透传连接,并通过某种策略来管理这些连接的分发和处理。策略支持轮询和并发模式,默认是使用并发。
- 发送接入请求报文:主站(或客户端)向远程设备(或服务器)发送一个请求,以建立通信连接。这个请求报文的目的是请求远程设备与主站建立连接,以便进行数据交换和通信。启用后,必须输入报文内容。
- 目的IP地址:目的IP地址是远程设备或服务器的IP地址,即接收方的网络地址。这个IP地址用于将报文发送到正确的目的地,以便远程设备能够接收并处理这个请求,并建立通信连接。下图是添加目的IP地址的示例:
添加完成后,可以对以添加的目的地址进行编辑和删除。
高级设置:
- 启用自发上报:设备能够主动发送数据到主站(或客户端),而不是等待主站发出请求。默认是开启
- 链接确认超时:在建立连接过程中,等待对方确认连接的最长时间。默认是2000毫秒。范围50-2147483647
- 链路空闲超时:在建立连接后,在没有数据交换的情况下,等待的最长时间。默认是10000毫秒。范围50-2147483647
- 时间设置:只支持本地时间
- 字节序:只支持ABCD格式
配置好IEC 101 Server参数后,点击“提交”按钮即可启用IEC 101 Server功能。在IEC 101 Server的状态页面,可以查看运行状态。
配置IEC 101 Server映射表
IEC 101 Server的映射表支持遥测、遥信、遥控三种类型。
遥测:遥测是指从远程站获取连续测量值的功能。这些测量值可以包括电流、电压、功率、能量等参数的实时值。IEC 101 Server可以向远程站发送查询命令,获取特定设备或系统的遥测值,并根据需要进行监测和记录。
遥信:遥信是指从远程站获取离散状态信息的功能。这些信息可以包括设备的开关状态、报警状态等。IEC 101 Server可以向远程站发送查询命令,获取特定设备或系统的遥信状态,并根据需要进行监测和记录。遥控:遥控是指远程控制远程站中设备或系统的功能。IEC 101 Server可以向远程站发送控制命令,例如打开/关闭开关、调节设备参数等,以实现对远程设备的远程控制。
下图是添加测点到IEC 101 Server映射表
添加映射参数介绍:
- 控制器:南向控制器设备
- 测点:南向控制器中的测点(注:遥测只支持非BIT数据类型的测点,遥信和遥控只支持BIT数据类型的测点)
- 读写权限:与南向控制器中该测点的读写权限保持一致(不可修改)
- 原始数据类型:与南向控制器中该测点的数据类型保持一致(不可修改)
- 映射数据类型:该测点在IEC 101 Server中的数据类型
- ASDU地址:在Server列表中的ASDU地址选择
- 类型ID:遥测的类型ID固定是:[13] M_ME_NC_1;遥信的类型ID固定是:[1] M_SP_NA_1; 遥控的类型ID固定是:[45] C_SC_NA_1
- 起始IOA:标识通信传输中信息对象的地址。
- 映射地址:由类型ID和起始IOA值决定
下图是批量添加测点到IEC 101 Server映射表
批量添加映射界面参数介绍(批量添加的测点只显示符合类型ID和符合检索条件的测点):
- ASDU地址:在Server列表中的ASDU地址选择
- 类型ID:遥测的类型ID固定是:[13] M_ME_NC_1;遥信的类型ID固定是:[1] M_SP_NA_1; 遥控的类型ID固定是:[45] C_SC_NA_1
- 起始IOA:标识通信传输中信息对象的地址。勾选的第一个测点的地址,其余勾选的测点的地址从上到下依次排序
- 映射地址:根据起始映射地址计算显示当前添加的测点映射地址范围
SL651
SL651配置
在SL651的配置页面,启用SL651后,界面如下图所示:
IEC 101 Server配置界面参数说明:
- 中心站地址:区分各个中心站的唯一标识符,默认是1,范围1-225
- 遥测地址:输入由行政区号和站点编号组成的10位遥测地址
- 遥测类别:支持“500吨/日以上”,“100~500吨/日”和“100吨/日以下”。默认使用“100吨/日以下”
- 密码:中心站的连接密码,不超过4字符
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
- 中心站列表:(至少添加一个中心站)
- IP地址:中心站的IP地址
- 端口号:中心站的端口信息
- 启用整刻上报:在每个整刻(即15分钟)的时间间隔内,自动上报数据。
- 上报周期:默认的上报周期是60秒,启用整刻上报后,默认的上报周期将为900秒。范围1-86400秒
- 通信超时时间:通信超时时间通常是指在建立通信连接或发送数据时,等待对方响应的最长时间。如果在设定的超时时间内未收到对方的响应,则通常会认为通信失败或超时。默认是5秒,范围1-3600秒
配置好SL651参数后,点击“提交”按钮即可启用SL651功能。在SL651的状态页面,可以查看运行状态和连接设备信息。
配置SL651映射表
下图是添加测点到SL651映射表(注:配置了要素类型的测点,才能添加到映射表中。)
对添加映射界面参数介绍如下:
- 映射数据类型:在SL651中的数据类型,可以根据实际情况进行配置。
- 要素类型:根据测点在应用场景进行选择
HJ212 Clinent
HJ212 Client配置
在HJ212 Client的配置页面,启用HJ212 Client后,界面如下图所示:
HJ212 Client配置界面参数说明:
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
- 平台设置:
点击“添加”按钮后,将展示如下界面:
添加平台参数介绍:
- 平台名称:自定义不重复名称
- 平台IP地址:服务器的IP地址
- 平台端口号:服务器的端口号
- MN编码:设备唯一标识,最大支持24字符
- 密码:身份验证的安全凭证,不能超过24个字符
- 通信模式:只支持上传模式
- TCP心跳时间:在TCP通信中,发送心跳包的时间间隔
- TCP重连间隔:在TCP连接断开后,重新尝试建立连接之间的时间间隔
数据设置:
添加数据集参数介绍:
- 数据集名称:自定义不重复的名称
- 系统编码:根据监测系统指定的系统编码,例如地表水质量检测的系统编码为21。最大支持两字符
- 上传周期:上报的时间间隔
配置好HJ212 Client参数后,点击“提交”按钮即可启用HJ212 Clinet功能。在HJ212 Clinet状态页面,可以查看运行状态和连接设备信息。
配置HJ212 Client映射表
下图是添加测点到HJ212 Client映射表(注:对监控因子和数据集都填写的测点才能添加的映射表中,如果只填写了一项,点击“确认”按钮将会报错)
添加映射的参数说明:
- 映射数据类型:在HJ212 Client中的数据类型
- 监控因子编码:用于区分不同检测参数或者检测因子,根据测点的实际意义匹配特定的检测参数
- 数据集:根据配置时的数据集进行选择
BACnet IP Server
BACnet IP Server配置
在BACnet IP Server的配置页面,启用BACnet IP Server后,界面如下图所示:
BACnet IP Server配置界面参数说明:
- 端口号:网关启用该服务器功能使用的端口号
- 本地设备ID:每个BACnet设备在其所在的网络中的唯一标识符
- 启用BBMD(允许设备通过广播方式进行通信,从而实现跨网段的通信):
- BBMD IP:用于管理BACnet广播通信的设备的IP地址,BBMD设备负责管理BACnet广播消息的路由和转发,以确保广播消息能够跨越不同的网络网段传输。
- BBMD TTL:BACnet广播消息在跨越网络时允许的最大传输跳数或生存时间。它用于限制广播消息在网络中传输的范围,防止消息无限制地传播,从而减少网络负荷和提高安全性
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
配置BACnet IP Server映射表
下图是添加测点到BACnet IP Server映射表:
添加映射界面参数介绍:
- 控制器:南向控制器设备
- 测点:南向控制器中的测点
- 读写权限:与南向控制器中该测点的读写权限保持一致(不可修改)
- 原始数据类型:与南向控制器中该测点的数据类型保持一致(不可修改)
- 对象类型:数据类型为BIT时,可以映射为以下类型:数字输入、数字输出、数字值。数据类型为非BIT和STRING以外的,可以映射为以下类型:模拟输入、模拟输出、模拟值、多态输入、多态输出、多态值。
- 映射数据类型:该测点在BACnet IP Server中的数据类型
- 实例号:用于标识网络中的不同对象实例,范围0-511
- 映射地址:根据对象类型自动生成。
下图是批量添加测点到BACnet IP Server映射表:
批量添加映射的参数介绍:
- 对象类型:从下拉框中选择,根据选择的对象类型下面表格中将展示出符合的测点
- 实例号:所选中的测点的起始的实例号
- 映射地址:根据对象类型、实例号和所选中的测点,自动生成相应的映射地址范围
- 映射数据类型:该测点在BACnet IP Server中的数据类型
DNP3 Outstation
DNP3 Outstation配置
在DNP3 Outstation的配置页面,启用DNP3 Outstation后,界面如下图所示:
DNP3 Outstation配置界面参数介绍:
基本设置:
- 通讯方式:支持TCP和UDP,默认使用TCP
- 本地端口号:Outstation通常监听一个本地端口号,以便与主站进行通信
- 选择通讯方式为UDP:
- 对端IP地址:UDP数据报发送的目标IP地址
- 对端端口号:UDP数据报发送的目标地址端口
- 站地址:DNP3通信网络中的设备或站点的唯一标识符
- 主站地址:DNP3通信网络中负责发送请求和控制命令的主站的唯一标识符
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
高级设置:
- 主动上报消息:启用后:
- 主动上报响应超时时间:Outstation向主站发送数据后,等待主站响应的超时时间。如果在超时时间内未收到主站的响应,则Outstation可能会认为通信失败
- 链路消息确认机制:启用后:
- 链路消息超时时间:链路消息超时时间是指在主站和Outstation之间建立通信链路后,等待链路消息的超时时间
- 链路消息最大重传次数:在建立通信链路后,如果未收到对方的确认消息(ACK),主站或Outstation将尝试重新发送链路消息的次数上限。
- 单帧最大字节数:在一个DNP3帧中可以传输的最大字节数。
- 应用层数据超时时间:在应用层发送数据后,等待对方应答的超时时间
配置好DNP3 Outstation参数后,点击“提交”按钮即可启用DNP3 Outstation功能。在DNP3 Outstation的状态页面,可以查看运行状态和连接的设备信息。
配置DNP3 Outstation映射表
下图是添加单个测点到DNP3 Outstation映射表:
添加映射的参数说明:
- 控制器:南向控制器设备
- 测点:南向控制器中的测点
- 读写权限:与南向控制器中该测点的读写权限保持一致(不可修改)
- 原始数据类型:与南向控制器中该测点的数据类型保持一致(不可修改)
- 地址类型:当测点数据类型为BIT是,可以映射为以下类型:数字量输入,数字量输出;当数据类型非BIT和STRING以外,可以映射为以下类型:模拟亮输入,模拟量输出,计数器输入。地址类型为数字量输入时,组号为1,变体为1;地址类型为数字量输出时,组号为10,变体为2;地址类型为模拟量输入时,组号为30,变体为5;地址类型为模拟量输出时,组号为40,变体为1;地址类型为计数器输入时,组号为20,变体为1。
- 映射数据类型:该测点在DNP3 Outstation中的数据类型
- 映射地址:根据地址类型自动生成。
下图是批量添加测点到DNP3 Outstation映射表:
批量添加映射参数介绍:
- 地址类型:选择后自动在表格中展示符合的测点信息
- 映射地址:根据所选择的地址类型和选中的测点,自动显示添加的测点的映射地址范围。
- 映射数据类型:该测点在DNP3 Outstation中的数据类型
IEC 61850 Server
IEC 61850 Server配置
在IEC 61850 Server 的配置页面,启用IEC 61850 Server后,界面如下图所示:
IEC 61850 Server配置界面参数介绍:
基本设置:
- 端口号:网关启用的服务器的端口号,应避免于其他服务启用的端口起冲突
- IED名称:唯一的标识符,根据具体的应用和要求进行命名,通常应该具有描述性并能够清晰地表达该IED的功能或位置。默认使用的INHAND。
- 逻辑设备名称:逻辑设备名称是在配置和管理IED时定义的,用于区分不同的功能单元,并在通信中对其进行标识
- 控制模式:支持四种“常规安全的直接控制”、“常规安全的操作前选择控制”、“增强安全的直接控制”、“增强安全的操作前选择控制”。
- 开启密码连接:启用后,填写密码才能连接该IEC 61850 Server
- 密码:设置连接IEC 61850 Server的连接密码
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
数据集设置:
添加数据集界面参数说明:
- 数据集名称:自定义不可重复的数据集名称
- 启用报告:一种用于定期发送数据变化信息的机制,通常用于监控电力系统中的设备状态和参数变化,默认关闭
- 报告控制块名称:定义报告的参数和行为。报告控制块通常会被分配一个唯一的名称,用于在配置中引用和识别该报告。
- 报告控制块ID:唯一标识报告控制块的值。
- 配置修订版本号:用来标识配置文件或者配置项的特定版本
- 是否缓冲事件:在报告机制中发生的事件被临时存储在设备或系统内部的缓冲区中,以等待传输到客户端
- 完整性周期:在报告中数据的完整性检查周期。它定义了报告数据的更新频率,即报告中的数据在多长时间内保持有效和可靠
- 缓冲时间间隔:报告数据在发送前被缓冲的时间间隔。当报告中的数据更新时,可以在一定的时间内将数据缓冲起来,以便在这段时间内发生的其他数据更新可以合并到同一报告中,从而减少报告的传输次数和通信负载
- 触发条件:报告数据发送的触发条件,支持“数据变化触发”、“品质因数改变触发”、“数据更新触发”、“完整性周期触发”、“总召触发”(可多选)
- 可选参数:选择参数后,接收到的报告中将包含配置的可选参数信息。支持“序列号”、“条目时间”、“条目包含原因”、“数据集名称”、“数据引用”、“缓冲区溢出”、“条目ID”、“配置修订”(可多选)
配置IEC 61850 Server映射表
下图是将南向控制器的测点1添加到IEC 61850 Server的映射表中:
添加映射的参数说明:
- 控制器:南向控制器设备
- 测点:南向控制器中的测点
- 读写权限:与南向控制器中该测点的读写权限保持一致(不可修改)
- 原始数据类型:与南向控制器中该测点的数据类型保持一致(不可修改)
- 数据对象类型:根据所选测点的数据类型不同,数据对象类型的可选项也不同。(可控的对象类型只有测点的读写权限是Read/Write才支持)
- BIT:单点状态信息,可控单点
- BYTE,SINT,WORD,INT,BCD,DWORD,DINT,BCD32,ULONG,LONG:双点状态信息,可控双点,整数状态信息,可控整数状态
- BYTE,SINT,WORD,INT,BCD,DWORD,DINT,BCD32,ULONG,LONG,FLOAT,DOUBLE:测量值,可控模拟设点信息。
- 映射数据类型:该测点在IEC 61850 Server中的数据类型
- 映射地址:根据起始映射地址自动显示。
- 添加到数据集:
- 数据集名称:启用添加到数据集后,在下拉框中选择。下拉框的内容是IEC 61850 Server配置时,配置的数据集。
下图是批量添加测点到IEC 61850 Server映射表的配置界面(注:“数据集名称”是可选项):
批量添加映射参数介绍:
- 数据对象类型:根据数据对象类型表格中显示支持的南向测点。对应关系(注:可控测点只显示读写权限为:Read/Write):
- 单点状态信息,可控单点:BIT数据类型;
- 双点状态信息,可控双点,整数状态信息,可控整数状态:BYTE,SINT,WORD,INT,BCD,DWORD,DINT,BCD32,ULONG,LONG数据类型;
- 双点状态信息,可控双点,整数状态信息,可控整数状态,测量值,可控模拟设点信息:BYTE,SINT,WORD,INT,BCD,DWORD,DINT,BCD32,ULONG,LONG,FLOAT,DOUBLE数据类型。
- 映射数据类型:该测点在IEC 61850 Server中的数据类型
SNMP Agent
SNMP Agent配置
在SNMP Agent 的配置页面,启用SNMP Agent 后,界面如下图所示:
SNMP Agent配置界面参数说明:
- 端口号:SNMP的端口号,默认是161
- 协议版本:支持三个主要版本,分别是V1、V2C、V3。默认是使用的V3版本
- 如果使用的协议版本是V3:
- 用户名:SNMPv3的安全名称,用于通信过程中进行身份验证。
- 是否启用认证:启用后:
- 认证算法:支持MD5和SHA
- 认证密码:身份验证机制,在authNoPriv和authPriv级别下,需要提供认证密码用于验证消息的发送者身份。
- 是否启用加密:在配置SNMPv3用户时,需要确保为每个用户启用了加密选项,并提供相应的加密密码。
- 加密算法:支持DES,AES128
- 加密密码:对消息的内容进行加密。
- 如果使用的是V1和V2C:
- 共用体:它类似于密码,用于标识允许访问 SNMP 代理的用户或管理系统界面
- 读写权限:配置映射表中的测点的读写权限,支持Read,Read/Write。
- 是否开启Trap:开启后,SNMP Agent将检测映射点数据是否变化,若发生变化会上报Trap消息,启用后:
- 目的IP:上报的Trap消息的目标地址IP
- 目的端口:上报的Trap消息的目标地址的端口,默认使用162
- 协议版本:支持三个主要版本,分别是V1、V2C、V3。默认是使用的V3版本
- 如果使用的协议版本是V3:
- 引擎ID:引擎ID用于生成和验证消息的安全参数,如认证密码和加密密码。通常是一个长度不固定的十六进制字符串
- 用户名:SNMPv3的安全名称,用于通信过程中进行身份验证。
- 是否启用认证:
- 是否启用认证:启用后:
- 认证算法:支持MD5和SHA
- 认证密码:身份验证机制,在authNoPriv和authPriv级别下,需要提供认证密码用于验证消息的发送者身份。
- 是否启用加密:在配置SNMPv3用户时,需要确保为每个用户启用了加密选项,并提供相应的加密密码。
- 加密算法:支持DES,AES128
- 加密密码:对消息的内容进行加密。
- 如果使用的是V1或者V2C:
- 共用体:它类似于密码,用于标识允许访问 SNMP 代理的用户或管理系统
- 映射值设置:支持数据原始值和数据运算值。默认是数据原始值(数据原始值:南向设备采集到的实际值;数据运算值:经过网关数据运算过后的值)
配置好SNMP Agent参数后,点击“提交”按钮即可启用SNMP Agent功能。在SNMP Agent的状态页面,可以查看运行状态信息。
配置SNMP Agent映射表
下图是将南向控制器的测点1添加到SNMP Agent中:
添加映射的参数说明:
- 控制器:南向控制器设备
- 测点:南向控制器中的测点
- 读写权限:与南向控制器中该测点的读写权限保持一致(不可修改)
- 原始数据类型:与南向控制器中该测点的数据类型保持一致(不可修改)
- 映射数据类型:该测点在SNMP Agnet中的数据类型
- OID节点地址:用来唯一标识管理信息的节点地址。OID是一个由一系列数字组成的标识符,用于表示网络中的各种对象,例如设备、接口、参数等。每个管理对象都有一个唯一的OID来标识。OID的结构是一个由点分隔的一系列数字。在DSA中OID自动生成
下图所示是选择测点2、4后,生成的OID节点地址,测点2对应地址是2,测点4对应地址是3(批量添加映射界面显示的OID节点地址省略了“.1.3.6.1.4.1.36153.1.2.0.”)
批量添加映射参数介绍:
- OID节点地址:勾选想要批量添加的测点后,按勾选测点从前到后,依次生成节点地址范围。
- 映射数据类型:该测点在SNMP Agent中的数据类型
附录:云服务
所有云服务使用说明使用统一的采集配置
标准MQTT云服务使用说明
1. EMQX客户端配置
在EMQX官网上(https://www.emqx.com/zh/mqtt/public-mqtt5-broker),选择在线使用MQTT客户端工具用于测试
在打开的弹窗中点击“New Connection”,在随后弹出的界面中填写Name字段后,其余配置不需要修改,最后点击“Connect”。
2. 边缘计算网关配置
2.1 数据采集配置
标准MQTT云服务使用说明的数据采集配置如图所示(配置Modbus控制器和说明请参考快速入门):
2.2 连接EMQX的免费服务器
在MQTT云服务页面,勾选启用云服务后,在“云平台类型”项中选择“标准MQTT”,并填写相应参数。
示例的配置信息如下:
- 服务器地址:broker.emqx.io
- MQTT客户端ID:任一对于服务器唯一的ID
其余配置保持默认即可
配置完成后点击“提交”按钮,如下图所示:
各项参数说明如下:
基本设置:
- 服务器地址:用于建立MQTT网络连接的服务器地址
- MQTT客户端ID:任一对于服务器唯一的ID
- 启用用户验证:启用后可以设置MQTT用户名和密码
- MQTT用户名:服务器启用了用户名密码的身份验证机制后,连接MQTT服务器需要使用的用户名
- MQTT密码:服务器启用了用户名密码的身份验证机制后,连接MQTT服务器需要使用的密码
高级设置:
- 端口号:MQTT服务器地址的端口
- Keep Alive:客户端发送心跳的时间间隔
- TLS加密:
- 关闭:关闭TLS加密
- 对称加密(客户端和服务器共享一个账号和密钥):
- Identity:服务器上保存的账号,用于验证身份
- 预共享密钥:服务器上保存的账号相应的密钥,用于请求或请求的摘要做加密
- 非对称加密(客户端生成一对唯一的密钥对,客户端和服务器共享公钥):
- 认证方式:支持两种:CA签名和CA自签名
- 验证服务器证书:启用后,会验证服务器证书的有效性
- CA签名:使用第三方受信任的证书颁发机构签发的证书,已预置于网关中
- CA自签名:使用自己创建的证书颁发机构签发的证书
- CA证书:CA根证书
- 客户端私钥:用于数据加解密的证书文件
- 客户端证书:用于客户端身份验证的证书文件
- 清除Session:清除会话,启用后断开连接再重连上时,重新建立会话
- MQTT版本:建立MQTT时连接使用的MQTT的版本
- 遗嘱消息:
- Topic:遗嘱消息主题
- Qos:遗嘱消息等级
- Retain:开启后,代理会保留最新的消息,在有新的MQTT客户端订阅相应的主题时,立即将保留消息发送至订阅端
- Payload:发布的遗嘱消息
2.3 发布消息到MQTT服务器
提交后在“消息管理”配置发布和订阅消息。下图是配置一条名称为inhand_pub,Topic是pubdata的发布消息:
发布消息配置参数说明如下:
- 名称:用户自定义发布名称(注:该名称在所有云服务的消息管理和自定义快函数里的发布消息里的名称具有唯一性)
- 数据源类型:发布消息的类型,支持“测点数据”和“告警数据”。
- 分组/标签:根据“数据源类型”选择,如果是“测点数据”则选择的是测点的分组,如果是“告警数据”则选择的是告警的标签。
- 屏蔽离线测点:开启后,离线的测点将屏蔽不再发布
- Topic: 自定义的Topic
- Qos(MQTT): 发布Qos,建议与MQTT服务器的Qos保持一致
- 入口函数:与脚本中的入口函数名称保持一致
- 函数代码:使用Python代码自定义组包和发布逻辑。(使用提供的默认代码即可)
在EMQX在线客户端中订阅消息
连接成功后,选择消息类型为JSON,点击“New
Subscription”,弹出的窗口中,Topic和Qos填写网关发布消息的Topic和Qos,最后点击“Confirm”。最后就可以查看网关上报的数据
2.4 订阅MQTT消息
下图是配置一条名称为inhand_sub,Topic是subdata,Payload类型是JSON的订阅消息:
订阅消息配置参数说明如下:
- 名称:自定义订阅名称(注:该名称在所有云服务的消息管理和自定义快函数里的订阅消息里的名称具有唯一性)
- Topic:与发布方的Topic保持一致
- Qos(MQTT):订阅Qos,建议与MQTT服务器的Qos保持一致
- 入口函数:与脚本中的入口函数名称保持一致
- Payload类型:支持Plaintext,Base64,JSON,HEX
- 函数代码:使用Python代码自定义解包和订阅逻辑,再添加订阅消息的时候默认有一个订阅脚本,该默认脚本即可订阅消息。可根据需求对此脚本进行修改
在EMQX在线客户端中发布消息
使用在线工具的发布功能,填写发布消息,消息类型选择JSON。Topic,Qos和网关订阅的Topic,Qos保持一致,最后点击“发布”按钮,即可以在网关日志中查看到发布的消息
MQTT SparkPlugB使用说明
1. Ignition配置
使用Ignition软件可以查看网关上传的数据和下发数据到网关。你可以点这里下载相应的Ignition软件。
安装完成后,执行下图操作
在弹出的窗口中,选择“Standard Edition”。设置用户名密码,最后点击“Start Gateway”
设置Ignition登录用户名密码
下载“Designer Launcher”,安装后添加Designer
点击这里下载MQTT-Engine-signed.modl模块。
在Config > Modules里导入刚刚下载的MQTT-Engine-signed.modl模块
添加完成后,在Config界面菜单栏将出现一个MQTT ENGINE的配置项,点击进入配置
取消勾选这两处功能。填写服务器地址,本次以EMQX服务器为例,URL:tcp://broker.emqx.io:1883。最后点击“Save Changes”
配置完成后,打开Designer Launcher软件,双击刚刚添加的Designer。填写Ignition的用户名密码。
创建一个Project,添加一个Project Name即可,最后点击“Create New Project”
2. 边缘计算网关配置
2.1 数据采集配置
标准MQTT云服务使用说明的数据采集配置如图所示(配置Modbus控制器和说明请参考快速入门):
2.2 连接MQTT服务器
在MQTT云服务页面,勾选启用云服务后,在“云平台类型”项中选择“MQTT SparkPlugB”,并填写相应参数。
本次示例以EMQX服务器为例。示例配置如下:
服务器地址:broker.emqx.io
MQTT客户端ID:任一对于服务器唯一的ID
分组ID:当前网关所属的分组。(注:网关的SN即是Node ID)
其余配置保持默认即可。
在提交配置后,网关将自动生成发布和订阅的脚本。
各项参数说明如下:
基本设置:
服务器地址:用于建立MQTT网络连接的服务器地址
MQTT客户端ID:任一对于服务器唯一的ID
分组ID:标识设备或设备组的唯一标识符,将当前设备分配到该分组ID,以用于SparkplugB网络中进行识别和通信。
启用用户验证:启用后可以设置MQTT用户名和密码
MQTT用户名:服务器启用了用户名密码的身份验证机制后,连接MQTT服务器需要使用的用户名
MQTT密码:服务器启用了用户名密码的身份验证机制后,连接MQTT服务器需要使用的密码
高级设置:
端口号:MQTT服务器地址的端口
Keep Alive:客户端发送心跳的时间间隔
TLS加密:
关闭:关闭TLS加密
对称加密(客户端和服务器共享一个账号和密钥):
Identity:服务器上保存的账号,用于验证身份
预共享密钥:服务器上保存的账号相应的密钥,用于请求或请求的摘要做加密
非对称加密(客户端生成一对唯一的密钥对,客户端和服务器共享公钥):
认证方式:支持两种:CA签名和CA自签名
CA签名:使用第三方受信任的证书颁发机构签发的证书,已预置于网关中
CA自签名:使用自己创建的证书颁发机构签发的证书
CA证书:CA根证书
客户端私钥:用于数据加解密的证书文件
客户端证书:用于客户端身份验证的证书
验证服务器证书:启用后,会验证服务器证书的有效性
清除Session:清除会话,开启后断开连接再重连上时,重新建立会话
MQTT版本:建立MQTT时连接使用的MQTT的版本
2.3 发布消息到MQTT服务器
通过Ignition查看网关发布的数据。(注:由于网关和该软件定义数据类型的值不同,有些数据类型的值该软件无法解析)
2.4 订阅MQTT消息
在Ignition里双击想要修改的测点的value,修改完后输入回车,在随后的弹窗中,点击“Write Once”,最后在网关上的测点监控里即可查看到修改的数值。
阿里云IoT使用说明
1. 阿里云配置
如果你已经在阿里云的物联网云平台中配置了相应的产品和设备,可以直接查看下一节4.1.3.2 边缘计算网关配置。否则请按照如下流程配置物联网云平台中的产品和设备。访问阿里云官网 https://www.aliyun.com 并登录,登录后选择“物联网平台”。
进入物联网平台后点击“公共实例”
1.1 创建产品
步骤1:创建产品
进入“设备管理 > 产品”页面,点击“创建产品”。
以下为添加一个路灯照明产品的示例。注意:数据格式仅支持“ICA标准数据格式”,认证方式仅支持“设备密钥”。
步骤2:为产品定义功能(可选)
创建完成后,点击“前往功能定义”。
点击“编辑草稿”以配置产品的功能定义。
点击“添加自定义功能”并配置相应的“服务”和“事件”,关于服务和事件的介绍请参考添加单个物模型。注意:配置服务时,调用方式仅支持异步。
配置服务(使用自定义Topic时无需配置此项)
在“输入参数”下点击“增加参数”,并配置相应的输入参数。
配置事件(使用自定义Topic时无需配置此项)
在“输出参数”下点击“增加参数”,并配置相应的输出参数。
配置完成后点击“发布上线”以提交配置。
步骤3:导出物模型TSL
产品配置完成后,在“功能定义”页面点击“物模型TSL”,随后选择“完整物模型”并点击“导出模型文件”以备后续使用。注意:导出物模型时不要选择“精简物模型”,否则可能导致数据上报异常。
1.2 创建设备
进入“设备管理 > 设备 > 设备列表”页面,点击“添加设备”。
选择上一步中创建的产品并配置其他参数。
添加成功后点击“前往查看”查看设备的详细信息。
“设备详情”页面如下图所示:
至此,完成了在阿里云的物联网云平台中配置了相应的产品和设备。
2. 边缘计算网关配置
2.1 数据采集配置
标准MQTT云服务使用说明的数据采集配置如图所示(配置Modbus控制器和说明请参考快速入门):
2.2 连接阿里云IoT
在MQTT云服务页面,勾选“启用云服务”并选择类型为“阿里云IoT”。阿里云IoT的认证方式有两种,一机一密和一型一密。关于认证方式的详细介绍请参考阿里云设备安全认证。
使用“一机一密”的认证方式与阿里云IoT建立连接时,选择认证方式为“一机一密”。示例配置如下:
各项参数说明如下:
Region ID:Region ID的配置方式请参考地域和可用区。文档中的地域名称为华东2,因此使用cn-shanghai。
认证方式:根据实际情况选择认证方式,本次使用一机一密
ProductKey:进入“设备管理 > 设备 >IoTTest”页面,点击“DeviceSecret”后的“查看”以复制认证信息。
DeviceName:获取方法同一机一密的ProductKey。
DeviceSecret:获取方法同一机一密的ProductKey。
物模型TSL:导入创建产品时保存的物模型文件。说明:“消息管理”中仅使用“自定义Topic”类型的消息时可以不导入物模型。
连接阿里云IoT成功后如下图所示:
使用“一型一密”的认证方式与阿里云IoT建立连接时,选择认证方式为“一型一密”。示例配置如下:
注意:
认证方式为“一型一密”时,需要开启“动态注册”。
仅未激活的设备支持通过一型一密认证方式与阿里云IoT建立连接且在连接建立后设备自动激活,激活后切换为一机一密与阿里云IoT连接。你可以在设备页面查看设备是否有激活时间来判断设备是否已激活。
各项参数说明如下:
Region ID:与一机一密一致
认证方式:根据实际情况选择认证方式,本次使用一型一密
ProductKey:进入“设备管理 > 设备 >阿里云IoT”页面,点击“ProductSecret”后的“查看”以复制认证信息。
DeviceName:设备名称,获取方法同一机一密的ProductKey。
ProductSecret:获取方法同一型一密的ProductKey。
物模型TSL:导入创建产品时保存的物模型文件。说明:“消息管理”中仅使用“自定义Topic”类型的消息时可以不导入物模型。
连接阿里云IoT成功后如下图所示:
2.3 发布消息到阿里云IoT
在MQTT云服务页面,在“消息管理 > 发布”中添加发布消息。发布消息支持三种类型的发布消息:自定义topic、属性上报和事件上报。
数据上报时的数据格式要求见物模型开发。注意:使用属性上报和事件上报时,请确保“物模型TSL”与阿里云IoT中产品的物模型一致。
自定义topic
发布消息类型为自定义topic的示例配置如下:
发布消息配置参数说明如下:
名称:用户自定义发布名称(注:该名称在所有云服务的消息管理和自定义快函数里的发布消息里的名称具有唯一性)
数据源类型:发布消息的类型,支持“测点数据”和“告警数据”。
分组/标签:根据“数据源类型”选择,如果是“测点数据”则选择的是测点的分组,如果是“告警数据”则选择的是告警的标签。
屏蔽离线测点:开启后,离线的测点将屏蔽不再发布
类型:支持“自定义Topic”,“属性上报”,“事件上报”。
Topic:发布主题,与阿里云IoT的“设备管理 > 产品 > 阿里云IoT > Topic类列表 > 自定义Topic”页面中“操作权限”为“发布”的Topic类保持一致。说明:主题中的ProductKey 和DeviceName信息会自动补全,配置主题时复制${deviceName}/后的主题信息即可。
Qos(MQTT):发布Qos,建议与MQTT服务器的Qos保持一致。
入口函数:与脚本中的入口函数名称保持一致
函数代码:使用Python代码自定义组包和发布逻辑,在添加发布消息时候默认有一个发布脚本,该默认脚本即可发布消息。可根据需求对此脚本进行修改。
属性上报
你可以进入阿里云IoT的“设备管理 > 产品 > 阿里云IoT >功能定义”页面查看产品的属性事件等信息。示例的产品具备一个名称为“工作状态”的属性,该属性的标识符为“LightStatus”。使用示例脚本可以“LightStatus”变量的值通过属性上报上传至阿里云IoT,配置如下。
发布消息配置参数说明请参考自定义topic。
Topic使用默认的即可。
示例函数代码:
# Enter your python code.
import json
import random
from common.Logger import logger
from quickfaas.aliyuniot import thing_post_property
def main(message):
logger.debug(message)
for measure in message['measures']:
if measure['name'] == 'LightStatus':
thing_post_property(__topic__, {"LightStatus": measure['value']})
可在阿里云IoT的“设备管理 > 设备 > IoTTest > 物模型数据 > 运行状态”页面查看属性状态。
事件上报
你可以进入阿里云IoT的“设备管理 > 产品 > 阿里云IoT >功能定义”页面查看产品的属性事件等信息。示例的产品具备一个名称为“事件测试”的事件,该事件的标识符为“event_test”。使用示例脚本可以让“event_test”变量的值通过事件上报上传至阿里云IoT,配置如下。
发布消息配置参数说明请参考自定义topic。
Topic使用默认的即可。
示例函数代码:
# Enter your python code.
import json
import random
from common.Logger import logger
from quickfaas.aliyuniot import thing_trigger_event
def main(message):
logger.debug(message)
if message['measureName'] == 'event_test':
thing_trigger_event(__topic__, ("event_test", {"ErrorCode": message['value']}))
触发事件上报时,需要配置“event_test”测点一条告警规则,告警信息如下(配置告警规则请参考:2.2 告警规则):
配置完告警规则后,修改测点的值大于15将上报事件消息。可在阿里云IoT的“设备管理 > 设备 > IoTTest
> 物模型数据 > 事件管理”页面查看属性状态。
2.4 订阅阿里云IoT的消息
在MQTT云服务页面,在“消息管理 > 订阅”中添加订阅消息。订阅消息支持四种类型的订阅消息:自定义topic、服务调用、属性设置和RRPC。
2.4.1自定义topic
订阅消息类型为自定义topic的示例配置如下:
订阅消息配置参数说明如下:
名称:自定义订阅名称(注:该名称在所有云服务的消息管理和自定义快函数里的订阅消息里的名称具有唯一性)
类型:支持4种类型,分别是:自定义Topic,服务调用,属性设置,RRPC。
Topic:订阅主题,与阿里云IoT的“设备管理 > 产品 > 阿里云IoT > Topic类列表 > 自定义Topic”页面中“操作权限”为“订阅”的Topic类保持一致。说明:主题中的ProductKey 和DeviceName信息会自动补全,配置主题时复制${deviceName}/后的主题信息即可。
Qos:订阅Qos,默认为1。
入口函数:与脚本中的入口函数名称保持一致
Payload类型:支持Plaintext,Base64,JSON,HEX
函数代码:使用Python代码自定义解包和订阅逻辑,再添加订阅消息的时候默认有一个订阅脚本,该默认脚本即可订阅消息。可根据需求对此脚本进行修改。
2.4.2服务调用
以下是服务调用的示例,该示例可以接受阿里云IoT下发的“服务测试”设置指令。注意:使用服务测试时,请确保网关中的“物模型TSL”与阿里云IoT中产品的物模型一致。
订阅消息配置参数说明请参考自定义topic。(注意:Topic与自定义Topic不同,需要修改默认Topic,服务标识符在“设备管理 > 产品 > 阿里云IoT >功能定义”获得)
示例函数代码:
#Enter your python code.
import json
import random
from common.Logger import logger
from quickfaas.aliyuniot import thing_answer_service
def main(topic, payload):
logger.info(topic)
topic = topic + "_reply"
thing_answer_service(topic, {"Power": 1})
进入阿里云IoT的“监控运维 > 在线调试 > 调试真实设备 > 服务调用”页面选择相应的产品和设备进行服务调用测试;在“设备管理 > 设备 > IoTTset> 物模型数据 > 服务调用”页面查看服务调用信息。
2.4.3 属性设置
以下是属性设置的示例,该示例可以接受阿里云IoT下发的“工作状态”指令。注意:使用属性设置时,请确保网关中的“物模型TSL”与阿里云IoT中产品的物模型一致。
订阅消息配置参数说明请参考自定义topic。
示例函数代码:
# Enter your python code.
import json
from common.Logger import logger
from quickfaas.measure import write_plc_values
def write_callback(message, userdata):
logger.debug("write plc response: %s, userdata:%s" % (message, userdata))
def main(topic, payload, cloudName):
logger.debug("subscribe topic: %s, payload: %s, cloudName: %s" % (topic, payload, cloudName))
write_plc_values(message={"LightStatus":json.loads(payload)['params']['LightStatus']}, callback=write_callback, userdata="")
进入阿里云IoT的“监控运维 > 在线调试 > 调试真实设备 > 属性调试”页面选择相应的产品、设备、调试功能和方法进行属性设置测试;在“设备管理 > 设备 > IoTTest > 物模型数据 > 运行状态”页面查看设备运行状态。
2.4.4 RRPC
订阅消息配置参数说明请参考自定义topic。(注意:Payload类型请选择Base64)
示例代码函数:
# Enter your python code.
import json
import base64
from common.Logger import logger
from quickfaas.aliyuniot import thing_answer_rrpc
def main(topic, payload):
logger.debug(topic)
logger.debug(base64.b64decode(payload))
topic = topic.replace("request", "response")
thing_answer_rrpc(topic, payload)
配置好网关后,点开此处链接,登录阿里云网站进入调用RRPC服务界面。
当结果信息中的“success”的值为true时,认为下发成功
“RequestBase64Byte”为想要下发base64编码格式的消息。例如{“Power”:1}的base64编码格式的值为eyJQb3dlciI6IDF9。
最后在网关的日志中就可以查看到下发的消息
AWS IoT使用说明
1. AWS IoT配置
如果你已经在AWS的IoT控制台中配置了相应的事物、策略和证书,可以直接查看下一节4.1.4.2边缘计算网关配置。否则请按照如下流程配置IoT控制台。访问AWS官网 https://aws.amazon.com/ 并登录控制台,中国区域的用户可以使用AWS中国区域的AWS服务,地址为 https://cn-northwest-1.console.amazonaws.cn。需要注意的是,两者的数据相互独立。登录控制台后选择“IoT Core”,使用中国AWS服务时选择“AWS IoT”。登录后,搜索“Amazon
IoT”,进入后创建一个物品并附加策略和下载证书。
2. 边缘计算网关配置
2.1 数据采集配置
标准MQTT云服务使用说明的数据采集配置如图所示(配置Modbus控制器和说明请参考快速入门):
2.2 连接AWS IoT
在MQTT云服务页面,勾选“启用云服务”并选择类型为“AWS IoT”。示例配置如下:
各项参数说明如下:
终端节点:AWS IoT的终端节点地址,可从AWS IoT的“设置”页面获取。使用“VeriSign Class 3 Public Primary G5 根 CA 证书”时,请删除地址中的“-ats”
MQTT客户端ID:任一唯一ID
物品的证书:导入创建物品时下载的物品证书或自定义证书
私有密钥:导入创建物品时下载的私有秘钥或自定义私有秘钥
CA证书:导入用于服务器身份验证的CA证书,你可以导入创建物品时下载的CA1证书,或者从这里下载相应的CA证书(建议使用Amazon Root CA 1或Starfield 根 CA 证书)。目前不支持“Amazon Root CA 3”证书
端口号:8883
其余项使用默认配置即可
2.3 发布消息到AWS IoT
在“云服务 > 消息管理”中添加一条发布消息,配置如下:
示例函数代码:
# Enter your python code.
import json
from common.Logger import logger
from quickfaas.awsiot import awsiot_publish
def main(message):
logger.debug(message)
awsiot_publish(__topic__, json.dumps(message), __qos__)
发布消息配置参数说明如下:
名称:用户自定义发布名称(注:该名称在所有云服务的消息管理和自定义快函数里的发布消息里的名称具有唯一性)
数据源类型:发布消息的类型,支持“测点数据”和“告警数据”。
分组/标签:根据“数据源类型”选择,如果是“测点数据”则选择的是测点的分组,如果是“告警数据”则选择的是告警的标签。
屏蔽离线测点:开启后,离线的测点将屏蔽不再发布
Topic:自定义的Topic
Qos(MQTT):发布Qos。
入口函数:与脚本中的入口函数名称保持一致
函数代码:使用Python代码自定义组包和发布逻辑。
在AWS IoT中订阅消息
进入AWS IoT的“测试/MQTT测试客户端”页面,在“订阅主题”中输入网关的发布Topic,本文档为awsiot/test。
订阅到消息后,订阅主题后,可在订阅主题页面查看收到的消息内容。
2.4 订阅AWS IoT消息
在“云服务 > 消息管理”中添加一条订阅消息,配置如下:
名称:自定义订阅名称(注:该名称在所有云服务的消息管理和自定义快函数里的订阅消息里的名称具有唯一性)
Topic:订阅主题,与AWS发布的主题保持一致
Qos(MQTT):订阅Qos,默认为1。
入口函数:与脚本中的入口函数名称保持一致
Payload类型:支持Plaintext,Base64,JSON,HEX
函数代码:使用Python代码自定义解包和订阅逻辑,在添加订阅消息的时候默认有一个订阅脚本,该默认脚本即可订阅消息。可根据需求对此脚本进行修改。
在AWS中配置发布消息的Topic和Payload,点击发布后,在网关的日志中即可查看到发布的消息
Azure IoT使用说明
1. Azure IoT配置
如果你已经在Azure IoT中配置了相应的IoT Hub和IoT device,可以直接查看下一节4.1.5.2边缘计算网关配置。否则请按照如下流程配置Azure IoT。访问https://portal.azure.cn/登录Azure。
1.1 创建设备
登录Azure后,选择“IoT 中心”。
点击“创建”创建一个IoT Hub。
点击“新建”创建一个资源组,也可使用现有的资源组。
创建成功后,创建一个设备。如下图所示:
创建成功后如下图所示:
2. 边缘计算网关配置
2.1 数据采集配置
标准MQTT云服务使用说明的数据采集配置如图所示(配置Modbus控制器和说明请参考快速入门):
2.2 连接Azure IoT
在MQTT云服务页面,勾选“启用云服务”并选择类型为“Azure IoT”。示例配置如下:
各项参数说明如下:
认证方式:有三种认证方式(Symmetric Key; X.509 Self-Signed; X.509 CA Signed),根据创建设备的身份验证类型来选择。
连接字符串:Azure IoT
Device的主连接字符串,你可以从Azure IoT的IoT Hub中选择相应的设备并复制主连接字符串到此处
2.3 发布消息到Azure IoT
在“云服务 > 消息管理”中添加一条发布消息,配置如下:
发布消息配置参数说明如下:
名称:用户自定义发布名称(注:该名称在所有云服务的消息管理和自定义快函数里的发布消息里的名称具有唯一性)
数据源类型:发布消息的类型,支持“测点数据”和“告警数据”。
分组/标签:根据“数据源类型”选择,如果是“测点数据”则选择的是测点的分组,如果是“告警数据”则选择的是告警的标签。
屏蔽离线测点:开启后,离线的测点将屏蔽不再发布
Topic:自定义的Topic
Qos(MQTT):
入口函数:与脚本中的入口函数名称保持一致
函数代码:使用Python代码自定义组包和发布逻辑。(使用提供的默认代码即可)
使用VS Code的Azure IoT Tools插件建立与IoT Hub的连接
提交后发布消息后,使用Visual
Studio Code软件(以下简称VS Code)的Azure IoT Tools插件查看发送到Azure IoT的消息。你可以访问:https://code.visualstudio.com/Download 获取相应的Visual Studio Code软件(以下简称VS Code)。VS Code安装完毕后,打开VS Code并点击“Extensions”,在搜索框中输入Azure IoT Tools并安装Azure IoT Tools插件。
安装成功后在左侧可以看到Azure模块。
点击“资源管理器 > AZURE IOT HUB”,展开AZURE IOT HUB。点击“… > Set IoT Hub Connection String”设置IoT Hub的连接字符串。在提示框中输入IoT
Hub的连接字符串。IoT Hub的连接字符串可从指定IoT 中心的“策略名称 >
iothubowner”页面获取。
输入连接字符串并回车后在“AZURE IOT HUB”下可以看到已创建的Azure IoT Device和连接状态。
右击指定的Azure IoT
Device并在菜单中选择Start Monitoring Built-in Event Endpoint以查看网关推送到IoT Hub的数据。
在弹出的窗口中填写下图所示字符串,即可查看上报的数据
2.4 订阅Azure IoT消息
在“云服务 > 消息管理”中添加一条订阅消息,配置如下:
名称:自定义订阅名称(注:该名称在所有云服务的消息管理和自定义快函数里的订阅消息里的名称具有唯一性)
Topic:订阅主题
入口函数:与脚本中的入口函数名称保持一致
Payload类型:支持Plaintext,Base64,JSON,HEX
函数代码:使用Python代码自定义解包和订阅逻辑。可根据需求对此脚本进行修改。
示例函数代码:
# Enter your python code.
import json
from common.Logger import logger
def main(topic, payload):
logger.debug(topic)
logger.debug(payload)
右击指定的Azure IoT
Device并在菜单中选择Send C2D Message to Device以下发数据至网关。
在下发框中输入需要下发的数据,如{“message”:
”hello”}
回车发送数据后,在“输出”窗口可以看到消息下发成功的日志
同时在网关侧的日志中,也可查看到下发的消息
附录:导出的配置文件
测点CSV文件参数说明
参数名 | 界面配置项 |
MeasuringPointName | 测点名称 |
ControllerName | 所属控制器名称 |
GroupName | 所属分组 |
UploadType | 上传模式,支持periodic、onchange、never |
DeadZonePercent | 变化死区 |
DataType | 数据类型 |
ArrayIndex | 数组索引,当为OPC UA协议或者是OPC UA PUBSUB协议才配置这个参数 |
EnableBit | 按位取值 |
BitIndex | 位 |
reverseBit | 取反 |
Address | 测点地址 |
Decimal | 小数位,当数据类型为FLOAT或者是DOUBLE才配置这个参数 |
Len | 长度,当数据类型为STRING才配置这个参数 |
CodeType | 字符编码格式,当数据类型为STRING才配置这个参数 |
ReadWrite | 读写权限 |
Unit | 单位 |
Description | 描述 |
Transform Type | 数据运算,none是无,gain是比例换算,zoom是偏移及缩放,ptct是PT/CT,bit是位截取 |
MaxValue | 数据上限 |
MinValue | 数据下限 |
MaxScale | 比例上限 |
MinScale | 比例下限 |
Gain | 倍率 |
Offset | 偏移量 |
startBit | 起始位 |
endBit | 结束位 |
Pt | Pt |
Ct | Ct |
Mapping_table | 数值映射的映射表,例如将配置原始值为1,映射值为2,此项的内容为[{'source': 1, 'target': 2}] |
TransDecimal | 数据运算为比例换算,偏移及缩放和PT/CT配置里的小数位参数 |
bitMap | 当数据类型为BIT,或者使用位截取后,启用数值映射为1,反之为0 |
msecSample | 当控制器启用组包上报后,测点配置为组包上报为1,反之为0 |
storageLwTSDB | 存储历史数据 |
DataEndianReverse | 简单驱动协议的测点的测点字节序,与控制器一致为0,与控制器相反为1 |
ReadOffset | 起始读取字节 |
ReadLength | 读取字节长度 |
WriteOffset | 起始写入字节 |
WriteLength | 写入字节长度 |
DataParseMethod | 简单驱动协议的测点的解析方式 |
BitId | 已废弃 |
pollCycle | 轮询周期。0是轮询周期,1是轮询周期2 |
测点地址说明:
控制器 | 地址举例 | 说明 |
DNP3 TCP | 0-2-3-4 | 0:数字量输入 2:组号 3:变体 4:地址 |
*EFORT Robot | ReadEfortData_0 | 机器人详细信息 |
*FANUC Robot | ReadFanucData_0 | 机器人详细信息 |
*FANUC CNC 0i | ReadSpindleSpeed_0 | 主机旋转 |
FATEK Programe Port (编程口)/ FATEK Programe Port over TCP | X1 | X:地址类型;1:地址 |
*HJ212-2005-Serial/ HJ212-2017-Serial | 1-Rtd/1-Flag | 1:地址;-Rtd:污染物实时数据/-Flag:污染物采样标记 |
IEC 61850 MMS | simpleIOGenericIO/LLN0.NamPlt.ldNs[ST] | simpleIOGenericIO/LLN0.NamPlt.ldNs:对象引用,ST:功能约束 |
Modbus ASCII Modbus RTU over TCP Modbus TCP Modbus RTU Slave | 0X0001 | 0X:线圈寄存器 3X:输入寄存器(Modbus RTU Slave不支持) 4X:保持寄存器 |
MC 1E/MC 3E/MC 3C/MC 3C over TCP/MITSUBISHI Programe Port (编程口) | X1 | X:地址类型;1:地址 |
FINS TCP/FINS UDP/HostLink | D1 | D:地址类型;1:地址 |
OPC UA | ns=1;s=1 | ns= :NS(命名空间索引); s=:地址类型为String,如果地址类型为Number则为“i=” |
*OPC UA PUBSUB | 100;1,200;2/100;1 | 100:订阅分组ID 1:订阅写入ID 200:发布分组ID 2:发布写入ID 如果测点是只读的话,只需要100;1的订阅分组和写入ID即可 |
Mewtocol | X1 | X:地址类型;1:地址 |
ISO-on-TCP/PPI | I1 | I:地址类型;1:地址 |
其余控制器 | 1 | 其余控制器的测点地址填写整数即可 |
读取类型 | 地址 |
当前控制状态 | GetCtrlState_0 |
当前错误状态 | GetErrorState_0 |
物理关节点信息 | GetJointTarget_0 |
速度配比信息 | GetSpeedRatio_0 |
当前工作模式 | GetOperationMode_0 |
本机输入IO | GetIOIn_0 |
本机输出IO | GetIOOut_0 |
本机输入IO2 | GetIO2In_0 |
本机输出IO2 | GetIO2Out_0 |
日志记录 | GetLog_{"length":10} |
系统信息 | GetSystem_0 |
目标坐标信息 | GetRobotTarget_0 |
伺服使能状态 | GetServoEnable_0 |
当前程序运行状态 | GetRapidExecution_0 |
任务列表 | GetRapidTasks_0 |
对象类型 | 地址 |
模拟输入 | AI,1 |
模拟输出 | AO,1 |
模拟值 | AV,1 |
数字输入 | BI,1 |
数字输出 | BO,1 |
数字值 | BV,1 |
多态输入 | MSI,1 |
多态输出 | MSO,1 |
多态值 | MSV,1 |
控制环 | LOOP,1 |
趋势记录 | TRENDLOG,1 |
最小扩展对象 | PROPRIETARY_MIN,1 |
数据报文名称 | 数据标识 | 点位 | 地址(<数据标识:点位序号>) |
读计量数据 | 901F-16(当控制器中的仪表类型为10、11、12、13、30、40时可选) | 当前累积流量; 当前累积流量单位; 结算日累积流量; 结算日累积流量单位; 实时时间(可写) 状态字 | 901F-16:00 901F-16:01 901F-16:02 901F-16:03 901F-16:04 901F-16:05 |
901F-2E(当控制器中的仪表类型为20、21时可选) | 结算日热量; 结算日热量单位; 当前热量; 当前热量单位; 热功率; 热功率单位; 流量; 流量单位; 累积流量; 累积流量单位; 供水温度; 回水温度; 累积工作时间; 实时时间;(可写) 状态字 | 901F-2E:06 901F-2E:07 901F-2E:08 901F-2E:09 901F-2E:0A 901F-2E:0B 901F-2E:0C 901F-2E:0D 901F-2E:0E 901F-2E:0F 901F-2E:10 901F-2E:11 901F-2E:12 901F-2E:04 901F-2E:05 | |
历史计量数据 | D120~D12B(一共12个地址) 10 : A 11 : B | 上X月结算日(累积流量/热量) 上X月结算日(累积流量/热量)单位 | D12X:13 D12X:14 |
读价格表 | 8102 | 价格一;(可写) 用量一;(可写) 价格二;(可写) 用量二;(可写) 价格三(可写) | 8102:15 8102:16 8102:17 8102:18 8102:19 |
读结算日 | 8103 | 结算日(可写) | 8103:1A |
读抄表日 | 8104 | 抄表日(可写) | 8104:1B |
读购入金额 | 8105 | 本次购买序号;(可写) 本次购入金额;(可写) 累积购入金额; 剩余金额 状态字 | 8105:1C 8105:1D 8105:1E 8105:1F 8105:05 |
地址类型 | 地址 |
Single-Point Information | 1 1 |
Double-Point Information | 3 1 |
Step Position Information | 5 1 |
Bitstring(32bit) | 7 1 |
Measured Value(Normalized) | 9 1 |
Measured Value(Scaled) | 11 1 |
Measured Value(Short Float) | 13 1 |
Integrated Totals | 15 1 |
Parameter | 110 1 |
Single Command | 45 1 |
Double Command | 46 1 |
Regulating Step Command | 47 1 |
Set point command-Measured Value(Normalized) | 48 1 |
Set point command-Measured Value(Scaled) | 49 1 |
Set point command-Measured Value(Short Float) | 50 1 |
Bitstring command(32bit) | 51 1 |
分组CSV文件参数说明
参数名 | 界面配置项 |
GroupName | 分组名称 |
UploadInterval | 上报周期 |
EnablePerOnchange | 周期上报Onchange数据 |
OnchangePeriod | Onchange上报周期 |
LwTSDBSize | 最大条数。范围1-150000 |
strategy | 存储策略。1:与上报周期同步;2:独立存盘周期 |
storagePeriod | 存储周期,单位秒。范围1-86400 |
historyDataMode | 存储方式。gateway:网关存储;usb:USB;sd:SD卡 |
historyDataPath | 储存路径 |
告警规则CSV文件参数说明
参数名 | 界面配置项 |
AlarmName | 告警名称 |
ControllerName | 控制器名称 |
MeasuringPointName | 测点名称 |
AlarmLevel | 告警等级 |
Condition1 | 判断条件1。“=”、“!=”、“>”、“≥”、“<”、“≤”对应的是“eq”、“neq”、“gt”、“egt”、“lt”、“elt”。 |
Operand1 | 判断条件1的数值,只能是整数或小数 |
CombineMethod | 判断条件。None:无逻辑条件;and:&&逻辑条件;or:||逻辑条件 |
Condition2 | 判断条件2。“=”、“!=”、“>”、“≥”、“<”、“≤”对应的是“eq”、“neq”、“gt”、“egt”、“lt”、“elt”。 |
Operand2 | 判断条件2的数值,只能是整数或小数 |
AlarmContent | 告警内容,不能超过70个字符 |
AlarmTag | 告警标签 |
告警标签CSV文件参数说明
参数名 | 界面配置项 |
AlarmLableName | 告警标签名称,范围1-240字节 |
上云测点设置CSV文件参数说明
参数名 | 界面配置项 |
MeasuringPointName | 测点的名称 |
ControllerName | 控制器名称 |
GroupName | 分组名称 |
UploadName | 上云测点名称 |
Hide | 屏蔽。0是不屏蔽测点;1是屏蔽测点 |
映射表CSV文件参数说明
Modbus TCP Slave
参数名 | 界面配置项 |
Measuring Point Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
readWrite | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
Start Mapping Address | 在Modbus TCP Slave的寄存器中起始地址。 |
IEC 104 Server
参数名 | 界面配置项 |
Measuring Point Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
ASDU | ASDU地址,在IEC 104 Server配置里的server列表里选择。范围0-65534 |
Type Id | 类型ID |
startIOA | 起始IOA地址,范围1-16777215 |
Modbus RTU Slave
参数名 | 界面配置项 |
Measuring Point Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
readWrite | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
Start Mapping Address | 在Modbus RTU Slave的寄存器中起始地址。 |
IEC 101 Server
参数名 | 界面配置项 |
Measuring Point Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
readWrite | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
ASDU | ASDU地址,在IEC 104 Server配置里的server列表里选择。范围0-65534 |
Type Id | 类型ID |
startIOA | 起始IOA地址,范围1-16777215 |
SL651
参数名 | 界面配置项 |
Measuring Point Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
readWrite | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
Identifi | 要素类型 |
HJ212 Client
参数名 | 界面配置项 |
Measuring Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
readWrite | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
Encode | 监控因子编码 |
Block | 数据集 |
BACnet Server
参数名 | 界面配置项 |
Control Name | 测点所属的控制器名称 |
Measuring Point Name | 测点名称 |
Read/Write | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
Object Type | 对象类型。模拟输入:AI,模拟输出:AO,模拟值:AV,多态输入:MSI,多态输出:MSO,多态值:MSV |
Instance Number | 实例号,范围0-511 |
DNP3 Outstation
参数名 | 界面配置项 |
Measuring Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
readWrite | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
Object Type | 映射地址的地址类型 |
Instance Number | 映射地址 |
IEC 61850 Server
参数名 | 界面配置项 |
Measuring Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
readWrite | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
CDC Type | 数据对象类型 |
Data Attribute Reference | 映射地址 |
Add Data Set | 添加到数据集 |
Data Set Name | 数据集名称 |
SNMP Agent
参数名 | 界面配置项 |
Measuring Name | 测点名称 |
Controller Name | 测点所属的控制器名称 |
readWrite | 读写权限,值与控制器中的测点读写权限保持一致。 |
Data Type | 原始数据类型,与控制器中的该测点的数据类型保持一致 |
Mapping Data Type | 映射数据类型 |
EnableBit | 与控制器中的该测点的按位取值保持一致,测点启用则为1,未启用则为0,没有该配置则为空,例如测点原始数据类型为FLOAT时,EnableBit为空。 |
OID | OID节点地址 |
自定义参数CSV文件参数说明
注意:导出的CSV文件内不包含SN和MAC的信息
参数名 | 界面配置项 |
key | 参数 |
value | 参数值 |
云服务配置文件参数说明
标准MQTT云服务
参数名 | 界面配置项 |
clouds | 云服务的配置信息 |
type | "Standard MQTT" |
cacheSize | 缓存大小设置,范围1~65535 |
enable | 0:禁用云服务,1:启用云服务 |
args | 不同云服务特定的参数集 |
host | 服务器地址 |
clientId | 客户端ID |
auth | 0:不启用用户验证;1:启用用户验证 |
username | 用户名 |
passwd | 密码 |
key | 客户端私钥 |
cert | 客户端证书 |
rootCA | CA证书 |
port | 端口号 |
keepalive | Keep Alive |
tls | 0:不启用TLS加密;1:对称加密;2:非对称加密 |
cleanSession | 清除Session |
mqttVersion | MQTT版本;v3.1/v3.1.1 |
tlsAuth | 认证方式(“caSigned”:CA签名;“caSelfSigned”:CA自签名) |
verifyServer | 验证服务器证书 |
willTopic | 遗嘱消息Topic |
willQos | 遗嘱消息Qos |
willRetain | 遗嘱消息Retain |
willPayload | 遗嘱消息Payload |
rootCA_content | CA证书内容 |
cert_content | 客户端私钥内容 |
key_content | 客户端证书内容 |
uploadRules | 上云测点配置 |
quickfaas | 消息管理配置 |
uploadFuncs | 发布脚本配置 |
downloadFuncs | 订阅脚本配置 |
MQTT SparkPlugB
参数名 | 界面配置项 |
clouds | 云服务的配置信息 |
type | "SparkPlugB MQTT" |
cacheSize | 缓存大小设置,范围1~65535 |
enable | 0:禁用云服务,1:启用云服务 |
args | 不同云服务特定的参数集 |
host | 服务器地址 |
clientId | 客户端ID |
groupId | 分组ID |
auth | 0:不启用用户验证;1:启用用户验证 |
username | 用户名 |
passwd | 密码 |
key | 客户端私钥 |
cert | 客户端证书 |
rootCA | CA证书 |
port | 端口号 |
keepalive | Keep Alive |
tls | 0:不启用TLS加密;1:对称加密;2:非对称加密 |
cleanSession | 清除Session |
mqttVersion | MQTT版本;v3.1/v3.1.1 |
tlsAuth | 认证方式(“caSigned”:CA签名;“caSelfSigned”:CA自签名) |
verifyServer | 验证服务器证书 |
rootCA_content | CA证书内容 |
cert_content | 客户端私钥内容 |
key_content | 客户端证书内容 |
uploadRules | 上云测点配置 |
quickfaas | 消息管理配置 |
uploadFuncs | 发布脚本配置 |
downloadFuncs | 订阅脚本配置 |
阿里云 IoT
参数名 | 界面配置项 |
clouds | 云服务的配置信息 |
type | "Aliyun IoT" |
cacheSize | 缓存大小设置,范围1~65535 |
enable | 0:禁用云服务,1:启用云服务 |
args | 不同云服务特定的参数集 |
host | Region ID |
connType | 认证类型:0:一机一密;1:一型一密 |
productKey | 阿里云ProductKey |
deviceName | 阿里云DeviceName |
deviceSecret | 阿里云DeviceSecret(一机一密) |
productSecret | 阿里云ProductSecret(一型一密) |
thingTSL | 阿里云物模型TSL |
rootCA | CA证书 |
port | 端口号 |
keepalive | Keep Alive |
tls | 0:不启用TLS加密;1:对称加密;2:非对称加密 |
cleanSession | 清除Session |
mqttVersion | MQTT版本;v3.1/v3.1.1 |
uploadRules | 上云测点配置 |
quickfaas | 消息管理配置 |
uploadFuncs | 发布脚本配置 |
downloadFuncs | 订阅脚本配置 |
AWS IoT
参数名 | 界面配置项 |
clouds | 云服务的配置信息 |
type | "AWS IoT" |
cacheSize | 缓存大小设置,范围1~65535 |
enable | 0:禁用云服务,1:启用云服务 |
args | 不同云服务特定的参数集 |
endPoint | AWS IoT 终端节点 |
clientId | 客户端ID |
cert | 物品的证书 |
key | 私有密钥 |
rootCA | CA证书 |
port | 端口号 |
keepalive | Keep Alive |
cleanSession | 清除Session |
mqttVersion | MQTT版本;v3.1/v3.1.1 |
rootCA_content | CA证书内容 |
cert_content | 物品的证书内容 |
key_content | 私有密钥内容 |
uploadRules | 上云测点配置 |
quickfaas | 消息管理配置 |
uploadFuncs | 发布脚本配置 |
downloadFuncs | 订阅脚本配置 |
Azure IoT
参数名 | 界面配置项 |
clouds | 云服务的配置信息 |
type | "Azure IoT" |
cacheSize | 缓存大小设置,范围1~65535 |
enable | 0:禁用云服务,1:启用云服务 |
args | 不同云服务特定的参数集 |
authType | 认证方式 |
connectionString | Azure IoT连接字符串 |
deviceCA | Azure IoT设备证书 |
deviceKey | Azure IoT私钥密钥 |
uploadRules | 上云测点配置 |
quickfaas | 消息管理配置 |
uploadFuncs | 发布脚本配置 |
downloadFuncs | 订阅脚本配置 |
开发者指南
Quick
Function API Reference
本章节将介绍网关内部使用的 Python API,它提供了一组功能丰富的接口,使用户能够通过编写 Python 脚本来实现对网关的各种操作和数据处理。本章节会为您提供必要的信息和示例代码,帮助您充分利用产品的功能和性能。
1. 发布测点/告警/自定义等数据到云端(发布快函数)
导入向云端发布数据的API:
from quickfaas.remotebus import publish
publish(topic, payload, qos=1, wizard_data=None, cloud_name="default")
topic: 发布数据的主题
payload: 发布的数据负载
qos: 发布数据的消息等级
wizard_data:首次推送消息失败,按照wizard_data指定的topic, payload, qos(如果没有指定wizard_data则使用发送的topic, payload, qos)存入离线缓存,等待连接恢复后按时间顺序上传至MQTT服务器
wizard_data格式如下:
{"topic":<topic>, "qos":<qos>, "payload":<payload>}
cloud_name:指定发布到哪个云,多云协同使用时可用
配置"发布"快函数时,快函数的传参message有两种格式(根据是否传入wizard_api决定)
入口函数包含wizard_api参数,脚本示例如下(默认脚本)
# Enter your python code.
import json
from common.Logger import logger
from quickfaas.remotebus import publish
def main(message, wizard_api, cloudName):
logger.debug("publish topic:%s, payload: %s, cloudName: %s" % (__topic__, message, cloudName))
publish(__topic__, json.dumps(message), __qos__, cloud_name=cloudName)
传入的message数据格式示例:
{
"timestamp": 1713498600,
"timestampMsec": 1713498600121,
"group_name": "default",
"values": {
"Modbus": {
"word": {
"raw_data": 22,
"timestamp": 1713498592,
"status": 1,
"timestampMsec": 1713498592261
}
}
}
}
入口函数不包含wizard_api参数,脚本示例如下:
# Enter your python code.
import json
from common.Logger import logger
from
quickfaas.remotebus import publish
def main(message, cloudName):
logger.debug("publish topic:%s, payload: %s, cloudName: %s" % (__topic__, message, cloudName))
publish(__topic__, json.dumps(message), __qos__, cloud_name=cloudName)
传入的message数据格式示例:
{
"timestamp": 1713498680,
"timestampMsec": 1713498680121,
"group": "default",
"measures": [
{
"ctrlName": "Modbus",
"name": "word",
"health": 1,
"timestamp": 1713498672,
"timestampMsec": 1713498672278,
"value": 22
}
]
}
2. 更新控制器的测点值
导入写测点值的API:
from quickfaas.measure import write
from quickfaas.measure import write_plc_values(推荐使用)
2.1 write
API原型(write):
write(message, timeout=60, cloudName=None)
message: 写测点消息,格式如下:
格式1:{"measures1": 12},测点名称如果重复或者不存在则会抛异常提示写值失败
格式2:{"controller1": {"measures1": 12}}
格式3:[{"name": "controller1", "measures":[{"name": "measures1", "value": 12}]}]
timeout: 写测点响应超时时间,默认60S
cloudName:代表哪个云平台调用写指令(用于判定当前云平台下的测点是否被屏蔽或者更名),选填
脚本示例如下(write):
from common.Logger import logger
from
quickfaas.measure import write
def action_name():
write_request = {"measures1": 12}
logger.debug('write plc response: %s' % write(write_request))
write_request = {"controller1": {"measures1": 12}}
logger.debug('write plc response: %s' % write(write_request))
write_request = [{"name": "controller1", "measures":[{"name": "measures1", "value": 12}]}]
logger.debug('write plc response: %s' % write(write_request))
格式1和格式2的返回数据内容(write):
[
{
"device": "controller1",
"var_name": "measures1",
"result": "OK", # "OK"代表成功,"Failed"代表失败
"error": "Success"
}
]
格式3的返回数据内容(write):
[
{
"name": "controller1",
"measures":[
{
"name": "measures1",
'error_code': 0, # 0代表成功,非0代表失败
"error_reason": "Success"
}
]
}
]
2.2 write_plc_values(推荐)
API原型(write_plc_values):
write_plc_values(message, callback=None, userdata=None, timeout=60, cloudName=None)
message: 写测点消息,格式如下:
格式1:{"measures1": 12},测点名称如果重复或者不存在则会抛异常提示写值失败
格式2:{"controller1": {"measures1": 12}}
格式3:[{"name": "controller1", "measures":[{"name": "measures1", "value": 12}]}]
callback:写PLC值返回时执行的回调函数
为了兼容DS1.0,callback回调函数也支持三个参数
userdata:传递给回调函数的参数
timeout: 写测点响应超时时间,默认60S
cloudName:代表哪个云平台调用写指令(用于判定当前云平台下的测点是否被屏蔽或者更名),选填
脚本示例如下(write_plc_values):
from common.Logger import logger
from quickfaas.measure import write_plc_values
def write_callback(message, userdata):
logger.debug("write plc response: %s, userdata:%s" % (message, userdata))
def write_callback2(message, userdata, wizard_api):
logger.debug("write plc response: %s, userdata:%s" % (message, userdata))
def action_name():
write_request = {"measures1": 12}
write_plc_values(message=write_request, callback=write_callback, userdata="")
write_request = {"controller1": {"measures1": 12}}
write_plc_values(message=write_request, callback=write_callback, userdata="")
write_request = [{"name": "controller1", "measures":[{"name": "measures1", "value": 12}]}]
write_plc_values(message=write_request, callback=write_callback2, userdata="")
格式1和格式2的回调函数返回数据内容(write_plc_values):
[
{
"device": "controller1",
"var_name": "measures1",
"result": "OK", # "OK"代表成功,"Failed"代表失败
"error": "Success"
}
]
格式3的回调函数返回数据内容(write_plc_values):
[
{
"name": "controller1",
"measures":[
{
"name": "measures1",
'error_code': 0, # 0代表成功,非0代表失败
"error_reason": "Success"
}
]
}
]
3. 召回控制器的测点数据
导入召回控制器测点数据的API:
from quickfaas.measure import recall
from quickfaas.measure import recall2(推荐使用)
3.1recall
API原型(recall):
recall(names=None, recall_type="measure", timeout=10, realTime=True)
names: 召回名称列表
recall_type为"measure"时:
None或者[],代表获取所有控制器下的所有测点数据
[{"name": "controller1", "measures": []}],代表获取控制器(controller1)下的所有测点数据
[{"name": "controller1", "measures": ["measure1", "measure2"]}],代表获取控制器(controller1)下测点"measure1"和"measure2"的数据
recall_type为"group"时:
["group1", "group2"],代表获取组"group1"和"group2"的数据
recall_type: 召回数据类型
"measure": 按照测点召回数据(如果names=[], 即没指定任何测点名称时,则召回设备上所有测点数据)
"group": 按照测点召回数据(这种模式数据通过组数据消息通道上传)
timeout: recall测点响应超时时间,默认10秒
realTime:是否读取实时数据,设置为True会立刻重新读取一次recall的测点,并返回最新读取到的值;默认为False,仅recall_type = "measure" 时有效
脚本示例如下(recall):
from common.Logger import logger
from quickfaas.measure import recall
def action_name():
# 召回所有控制器下的所有测点数据
logger.debug('recall all plc measures: %s' % recall())
# 召回控制器(controller1)下的所有测点数据
logger.debug('recall controller1 plc measures: %s' % recall([{"name": "controller1", "measures": []}]))
# 召回控制器(controller1)下测点"measure1"和"measure2"的数据
logger.debug('recall controller1 plc measures: %s' % recall([{"name": "controller1", "measures": ["measure1", "measure2"]}]))
# 召回组"group1"和"group2"的数据
recall(["group1", "group2"], "group")
召回的数据内容(recall):
[
{
"name": "controller1",
"health": 1,
"timestamp": 1582771955,
"measures":[
{
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12
},
{
"name": "measures2",
"health": 1,
"timestamp": 1582771955,
"value": 1.23
}
]
}
]
3.2 recall2(推荐)
API原型(recall2):
recall2(names=None, recall_type="measure", callback=None, userdata=None, timeout=10, realTime=True)
names: 召回名称列表
recall_type为"measure"时:
None或者[],代表获取所有控制器下的所有测点数据
[{"name": "controller1", "measures": []}],代表获取控制器(controller1)下的所有测点数据
[{"name": "controller1", "measures": ["measure1", "measure2"]}],代表获取控制器(controller1)下测点"measure1"和"measure2"的数据
recall_type为"group"时:
["group1", "group2"],代表获取组"group1"和"group2"的数据
recall_type: 召回数据类型
"measure": 按照测点召回数据(如果names=[], 即没指定任何测点名称时,则召回设备上所有测点数据)
"group": 按照测点召回数据(这种模式数据通过组数据消息通道上传)
callback:召回数据时执行的回调函数
为了兼容DS1.0,callback回调函数也支持三个参数
userdata:传递给回调函数的参数
timeout: recall测点响应超时时间,默认10秒
realTime:是否读取实时数据,设置为True会立刻重新读取一次recall的测点,并返回最新读取到的值;默认为False,仅recall_type = "measure" 时有效
脚本示例如下(recall2):
from common.Logger import logger
from quickfaas.measure import recall2
def recall2_callback(message, userdata):
logger.debug("recall2 response message: %s, userdata:%s" % (message, userdata))
def recall2_callback2(message, userdata, wizard_api):
logger.debug("recall2 response message: %s, userdata:%s" % (message, userdata))
def action_name():
# 召回所有控制器下的所有测点数据
recall2(callback=recall2_callback, userdata="")
# 召回控制器(controller1)下的所有测点数据
recall2(names=[{"name": "controller1", "measures": []}], callback=recall2_callback, userdata="")
# 召回控制器(controller1)下测点"measure1"和"measure2"的数据
recall2(names=[{"name": "controller1", "measures": ["measure1", "measure2"]}], callback=recall2_callback2, userdata="")
# 召回组"group1"和"group2"的数据
recall2(["group1", "group2"], "group")
召回的数据内容(recall2):
{
"timestamp": 1589507333.2521989,
"values": {
"controller1": {
"measure1": {
"raw_data": 12,
"timestamp": 1582771955,
"status": 1
},
"measure2": {
"raw_data": 1.23,
"timestamp": 1582771955,
"status": 1
}
}
}
}
4. 获取全局参数
导入获取全局参数的API:
from quickfaas.global_dict import get
from quickfaas.global_dict import get_global_parameter(推荐)
API原型:
get()
get_global_parameter()
脚本示例如下:
from common.Logger import logger
from quickfaas.global_dict import get
from quickfaas.global_dict import get_global_parameter
def action_name():
logger.debug('get global dict: %s' % get())
logger.debug('get global dict: %s' % get_global_parameter())
返回的数据内容:
# get接口
[
{
"key": "SN",
"value": "GL9021025088033"
}
]
# get_global_parameter接口
{
"SN": "GL9021025088033"
}
5. 获取控制器连接状态
导入获取获取控制器连接状态的API:
from quickfaas.controller import get_status
from quickfaas.controller import get_controller_status(推荐)
API原型:
get_status(controller=None)
get_controller_status(controller=None)
脚本示例如下:
from common.Logger import logger
from quickfaas.controller import get_status, get_controller_status
def action_name():
logger.debug('controller status: %s' % get_status())
logger.debug('controller status: %s' % get_controller_status())
# result: [{"name": "dev1", "health": 0, "timestamp": 1606784851}]
返回数据内容:
# get_status接口
[
{
"name": "dev1",
"health": 0,
"timestamp": 1606784851
}
]
# get_controller_status接口
{
"dev1": {
"health": 0,
"timestamp": 1606784851
}
}
6. 获取云连接状态
导入获取获取控制器连接状态的API:
from quickfaas.clouds import get_status
API原型:
get_status(cloud_name="default")
脚本示例如下:
from common.Logger import logger
from quickfaas.clouds import get_status
def action_name():
logger.debug('cloud connection status: %s' % get_status())
返回数据内容:
# 在线返回True
# 离线返回False
7. 获取全局配置
导入获取全局参数的API:
from quickfaas.config import get
API原型:
def get(runningConfig=True, timeout=10)
脚本示例如下:
from common.Logger import logger
from quickfaas.config import get
def action_name():
logger.debug('globle config: %s' % get())
返回数据内容:
#Global JSON configuration information
8. 设置全局配置
导入获取全局参数的API:
from quickfaas.config import set
API原型:
def set(config, timeout=10)
脚本示例如下:
from quickfaas.config import get, set
def action_name():
global_config = get()
#Example Modify the global_config configuration
set(global_config)
返回数据内容:无
9. 在脚本中读取文件
导入读取文件的API:
from quickfaas.file import faas_read_file
API原型:
def faas_read_file(filePath, mode='r', encode='utf-8', size=-1)
filePath:文件路径;
mode:mode 决定了打开文件的模式:只读,写入,追加等。所有可取值见如下的完全列表。这个参数是非强制的,默认文件访问模式为只读(r)。和python中open函数接口中的mode参数一致
encode:编码格式,和python中open函数接口中的encoding参数一致,默认为utf-8
size:读取的字节长度,size 未指定则返回整个文件,和python中read函数接口中的size参数一致
脚本示例如下:
# Enter your python code.
import json
from common.Logger import logger
from quickfaas.file import faas_read_file
def main(message):
try:
file_path = "/var/user/app/device_supervisor/test.txt"
data = faas_read_file(file_path, mode='r', encode='utf-8')
if data:
logger.info("data: %s" % data)
except Exception as e:
logger.error("Exception: %s" % (e))
返回数据内容:
#文件中所有内容的字符串;若出现错误会抛出异常
10. 在脚本中写入文件
导入读取文件的API:
from quickfaas.file import faas_write_file
API原型:
def faas_write_file(filePath, mode='w', data='', encode='utf-8')
filePath:文件路径;
mode:mode 决定了打开文件的模式:只读,写入,追加等。所有可取值见如下的完全列表。这个参数是非强制的,默认文件访问模式为只写 'w'。和python中open函数接口中的mode参数一致
data:需要写入文件的内容(字符串);默认为空字符串
encode:编码格式,和python中open函数接口中的encoding参数一致,默认为utf-8
脚本示例如下:
# Enter your python code.
import json
from common.Logger import logger
from quickfaas.file import faas_write_file,faas_read_file
def main(message):
try:
file_path = "/var/user/app/device_supervisor/test.txt"
faas_write_file(file_path, mode='w', data="test3", encode='utf-8')
except Exception as e:
logger.error("Exception: %s" % (e))
返回数据内容:无;若出现错误会抛出异常
11. 兼容DS1 API描述
11.1 get_group
API原型:
wizard_api.get_group()
脚本示例如下:
# Enter your python code.
import json
from common.Logger import logger
def main(message, wizard_api):
# 获取分组配置
response = wizard_api.get_group()
logger.debug("group config:%s" % response)
返回的数据内容:
[
{
"name": "default",
"uploadInterval": 10
},
{
"name": "group1",
"uploadInterval": 10
}
]
11.2 update_group
API原型:
wizard_api.update_group(group_data)
脚本示例如下:
# Enter your python code.
import json
from common.Logger import logger
def main(message, wizard_api):
# 更新分组配置信息
group_data = {"group_name":"group1", "upload_interval": 10}
response = wizard_api.update_group(group_data)
logger.debug("update group config response:%s" % response)
返回数据内容:
{
"results": {
"group_name":"group1",
"upload_interval": 10
}
}
12. LwTSDB时序数据通用API
12.1插入
API原型:
def insert_request(table_name, insert_data, noack=0, callback=None, userdata=None, timeout=30)
参数说明:
table_name:数据表名称
insert_data:需要插入到数据库的数据
格式为::{"<timestamp>": {"controller1": {"measure1": [<measure1_health>, <measure1_value>], "measure2": [<measure2_health>, <measure2_value>]}}}
noack:是否需要响应;0:需要响应,1:不需要响应
callback:数据返回的回调函数;可以为None表示不接收返回数据(noack为0时该参数才有意义)
原型::def insert_callback(message, userdata)
userdata:回调函数的传参(noack为0时该参数才有意义)
timeout:请求超时时间(默认30秒)
回调函数返回数据示例
脚本示例如下:
import time
from common.Logger import logger
from quickfaas.LWTSDB import insert_request
def insert_callback(message, userdata):
logger.debug("%s response message:%s" % (userdata, message))
def action_name():
insert_data = [
{str(int(time.time())): {"controller1": {"measure1": [1, 100], "measure2": [1, "test"]}}}
]
#向时序数据库插入一条数据,不需要响应
insert_request('default', insert_data, 1)
#向时序数据库插入一条数据,需要响应
insert_request('default', insert_data, 0, callback=insert_callback, userdata="insert")
12.2 查找
API原型:
def query_request(table_name, start_time=None, end_time=None, filter=None, limit=1000, offest=0, callback=None, userdata=None, timeout=30)
参数说明:
table_name:数据表名称
start_time:开始时间;格式为:%Y-%m-%d %H:%M:%S,如:2023-01-09 12:00:00
end_time:结束时间;格式为:%Y-%m-%d %H:%M:%S,如:2023-01-09 16:00:00
filter:获取数据的过滤规则(过滤测点名称,设置黑白名单);格式为:
{"default": "accept_all", "black_list": {"controller1": ["measure1", "measure2"]}, "white_list": []}
default:
"accept_all":默认返回所有测点,黑名单列表中的测点除外;
"deny_all":默认所有测点都不返回,白名单列表中的测点除外;
black_list:黑名单测点名称列表
white_list:白名单测点名称列表
limit:限制一次获取到记录的最大条目数;
offest:跳过符合记录的记录条数,通常和limit组合使用;
callback:获取数据返回的回调函数
原型:def query_callback(message, userdata)
userdata:回调函数的传参
timeout:请求超时时间(默认30秒)
备注:
当start_time字段为None时,表示 TIMESTAMP < end_time,默认为降序排列
当end_time字段为None时,表示 TIMESTAMP >= start_time,默认为升序排列
当start_time和end_time同时为None时,表示查询整个数据表,默认为升序排列
回调函数返回数据示例:
{
"total": 1000,
"offset": 0,
"size": 100,
"data":[
{"1669630340": {"controller1": {"measure1": [1, 100], "measure2": [1, "test1"]}}},
{"1669630350": {"controller1": {"measure1": [1, 101], "measure2": [1, "test2"]}}}
]
}
脚本示例如下:
from common.Logger import logger
from quickfaas.LWTSDB import query_request
def query_callback(message, userdata):
logger.debug("%s response message:%s" % (userdata, message))
def action_name():
#查询default数据表所有数据
query_request('default', callback=query_callback, userdata="query")
#查询default数据表数据('2023-01-09 12:00:00'之后的数据)
query_request('default', '2023-01-09 12:00:00', callback=query_callback, userdata="query")
#查询default数据表数据('2023-01-09 16:00:00'之后的最新一条数据)
query_request('default', '2022-12-09 16:00:00', limit=1, callback=query_callback, userdata="query")
# 查询default数据表数据('2023-01-09 16:00:00'之前的数据)
query_request('default', end_time='2023-01-09 16:00:00', callback=query_callback, userdata="query")
# 查询default数据表数据('2023-01-09 16:00:00'之前的最后一条数据)
query_request('default', end_time='2023-01-09 16:00:00', limit=1, callback=query_callback, userdata="query")
# 查询default数据表数据(从'2023-01-09 12:00:00'到'2023-01-09 16:00:00')
query_request('default', '2023-01-09 12:00:00', '2023-01-09 16:00:00', callback=query_callback, userdata="query")
# 查询default数据表数据(从'2023-01-09 12:00:00'到'2023-01-09 16:00:00',并过滤掉测点名称为"measure1"的测点)
filter = {"default": "accept_all", "black_list": {"controller1": ["measure1"]}}
query_request('default', '2023-01-09 12:00:00', '2023-01-09 16:00:00', filter, callback=query_callback, userdata="query")
# 查询default数据表数据(从'2023-01-09 12:00:00'到'2023-01-09 16:00:00',并只要测点名称为"measure1"的测点)
filter = {"default": "deny_all", "white_list": {"controller1": ["measure1"]}}
query_request('default', '2023-01-09 12:00:00', '2023-01-09 16:00:00', filter, callback=query_callback, userdata="query")
12.3 删除
API原型:
def remove_request(table_name, start_time=None, end_time=None, noack=0, callback=None, userdata=None, timeout=30)
参数说明:
table_name:数据表名称;
start_time:时序数据的起始时间;当start_time为None时,表示 TIMESTAMP < end_time
end_time:时序数据的截止时间;当end_time为None时,表示 TIMESTAMP >= start_time
noack:是否需要响应;0:需要响应,1:不需要响应
callback:数据返回的回调函数;可以为None表示不接收返回数据(noack为0时该参数才有意义)
原型:def remove_callback(message, userdata)
userdata:回调函数的传参(noack为0时该参数才有意义)
timeout:请求超时时间(默认30秒)
说明:当start_time和end_time同时为None时,表示清空整个数据表
回调函数返回数据示例:
{
"return_code": 0,
"return_msg":"okay"
}
脚本示例如下:
from common.Logger import logger
from quickfaas.LWTSDB import remove_request
def remove_callback(message, userdata):
logger.debug("%s response message:%s" % (userdata, message))
def action_name():
# 清空时序数据库数据,并且需要响应
remove_request('default', callback=remove_callback, userdata="remove")
# 清空时序数据库数据,不需要响应
remove_request('default', noack=1)
# 删除时序数据库数据(从'2023-01-09 12:00:00'到'2023-01-09 16:00:00'),并且需要响应
remove_request('default', '2023-01-09 12:00:00', '2022-12-09 16:00:00', 0, callback=remove_callback, userdata="remove")
# 删除时序数据库数据(删除'2023-01-09 16:00:00'以后的数据),并且需要响应
remove_request('default', '2023-01-09 16:00:00', callback=remove_callback, userdata="remove")
# 删除时序数据库数据(删除'2023-01-09 16:00:00'以前的数据),并且需要响应
remove_request('default', end_time='2023-01-09 16:00:00', callback=remove_callback, userdata="remove")
事件总线(Event Bus)
本章节将介绍网关内部消息总线的重要的 topic 和 Payload。通过阅读本章节,可以了解以及如何利用特定的 topic 和 Payload 实现数据的传输和处理。这将有利于更加灵活地使用网关功能。
1 连接内部MQTT消息总线
1.1 EC系列设备
MQTT服务器地址:127.0.0.1
端口号:9105
用户名:inhand
密码:inhand
在测点监控里创建添加一个控制器和测点。如图所示:
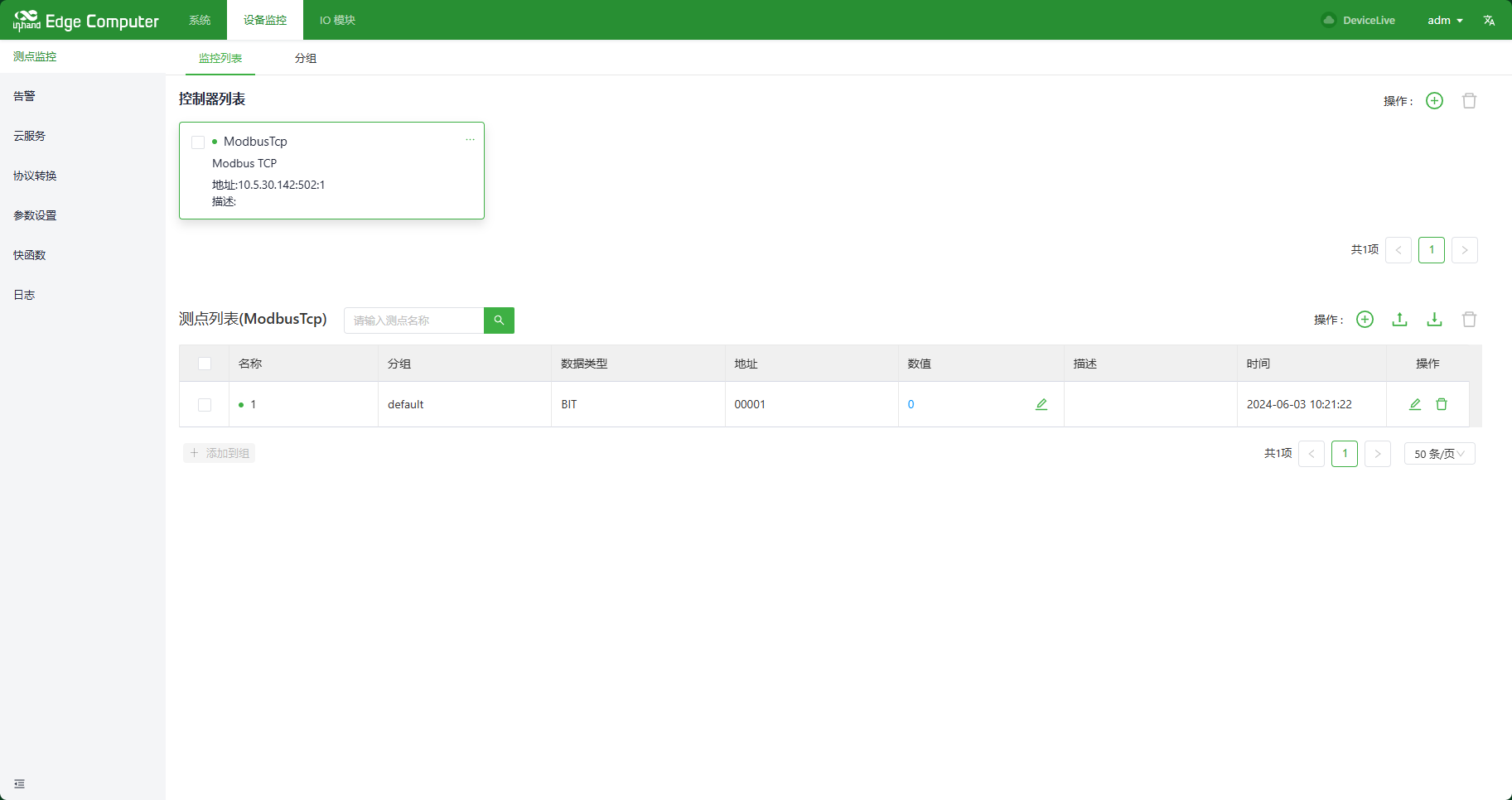
添加完控制器和测点后,进入EC设备后台,在后台安装mosquitto。执行如图所示命令:
安装后,执行如图所示命令,订阅driverServiceId为2000的driver发布的测点消息:

1.2 IG系列设备
MQTT服务器地址:127.0.0.1
端口号:9009
在测点监控里创建一个控制器和测点,如图所示:
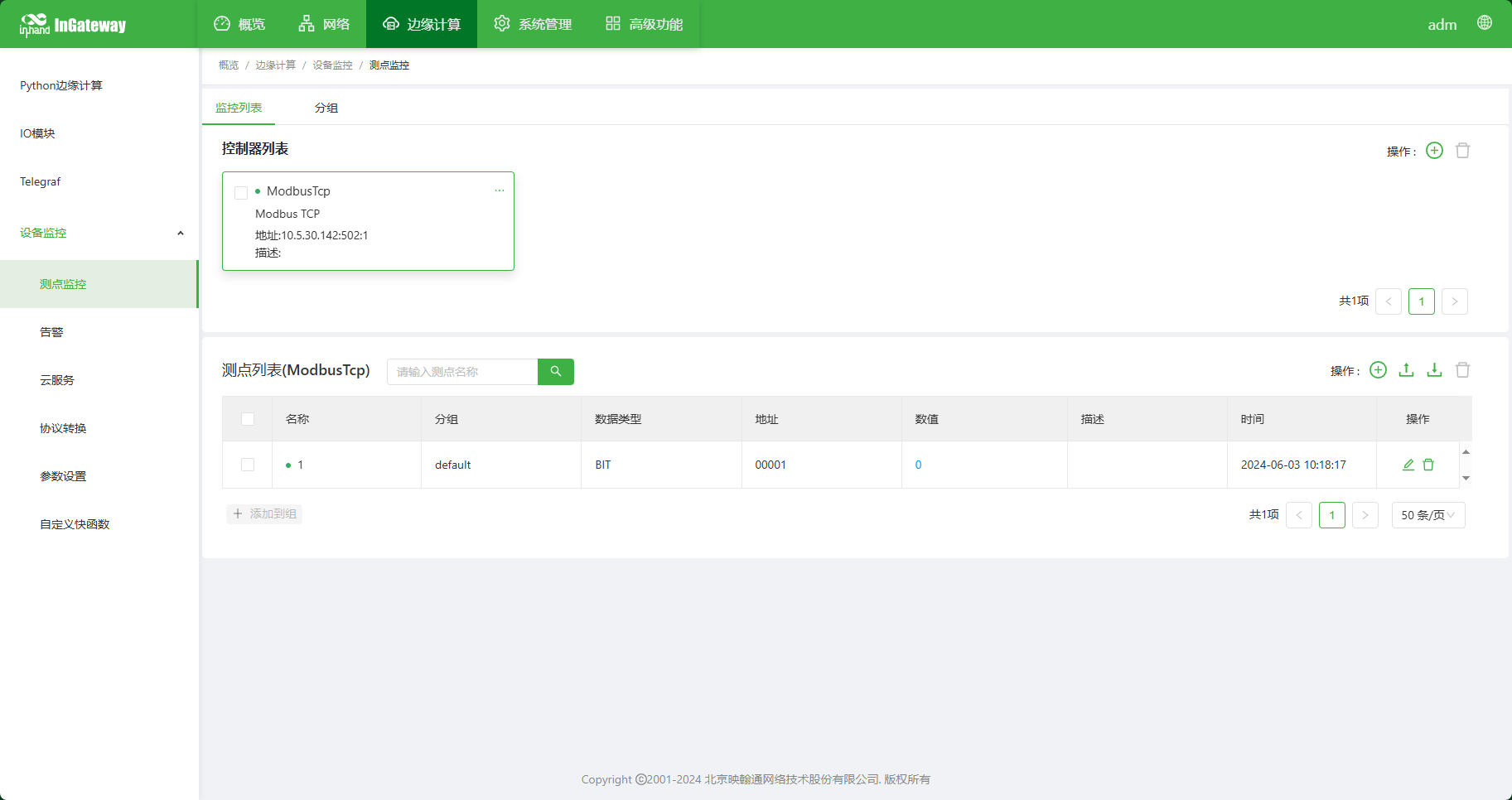
进入IG系列设备后台执行如下命令后可以订阅到driverServiceId为2000的driver发布的测点消息

2 南向消息总线
2.1 driver发布控制器测点值
Topic:ds2/eventbus/south/read/{driverServiceId}
{driverServiceId}:当前driver的ServiceId,可在日志中查看当前driver的ServiceId。
下图是展示的启用的ModbusDriver如何查看ServiceId(注意:ModbusDriver不是固定是2000,根据启用控制器的顺序不同,ServiceId也不同。实际的driverServiceId请以日志中显示的ServiceId为准):

Payload:{
"controllers": [
{
"name": "con1",
"version": "d3b0c5fc05cb72e7759c95f346e29f8d",
"health": 1,
"timestamp": 1582771955,
"measures":[
{
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12
}
]
}
]
}
说明:
controllers里的name:控制器名称
version:控制器配置版本信息(虚拟控制器可以不要该字段)
controllers里的health:控制器健康状态,1 --正常,0 --异常
timestamp:控制器健康状态更新时间
measures里的name:测点名称
measures里的health:测点健康状态,1 --正常,0 --异常
timestamp:查询操作Unix时间戳
value:测点值
Topic:ds2/eventbus/south/read/{driverServiceId}
{driverServiceId}:当前driver的ServiceId,可在日志中查看当前driver的ServiceId。
下图是展示的启用的ModbusDriver如何查看ServiceId(注意:ModbusDriver不是固定是2000,根据启用控制器的顺序不同,ServiceId也不同。实际的driverServiceId请以日志中显示的ServiceId为准):
{
"controllers": [
{
"name": "con1",
"version": "d3b0c5fc05cb72e7759c95f346e29f8d",
"health": 1,
"timestamp": 1582771955,
"measures":[
{
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12
}
]
}
]
}说明:
controllers里的name:控制器名称
version:控制器配置版本信息(虚拟控制器可以不要该字段)
controllers里的health:控制器健康状态,1 --正常,0 --异常
timestamp:控制器健康状态更新时间
measures里的name:测点名称
measures里的health:测点健康状态,1 --正常,0 --异常
timestamp:查询操作Unix时间戳
value:测点值
2.2 driver发布毫秒级数据信息
Topic:ds2/eventbus/south/upload/msec/data/{controllerName}
{controllerName}:为发布毫秒级数据的控制器名称
Payload:
[
{
"controller":["con1", 1, 1646910377],
"measure": {
"mea1": [1, 100],
"mea2": [1, 100]
}
},
{
"controller":["con1", 1, 1646910377],
"measure": {
"mea1": [1, 100],
"mea2": [1, 100]
}
}
]
说明:
controller数据:controller[0]代表控制器名称,controller[1]代表控制器健康状态,controller[2]代表采集时间戳
measure数据:key代表测点名称,measure[0]代表测点健康状态,measure[1]代表测点的值
Topic:ds2/eventbus/south/upload/msec/data/{controllerName}
{controllerName}:为发布毫秒级数据的控制器名称
Payload:
[
{
"controller":["con1", 1, 1646910377],
"measure": {
"mea1": [1, 100],
"mea2": [1, 100]
}
},
{
"controller":["con1", 1, 1646910377],
"measure": {
"mea1": [1, 100],
"mea2": [1, 100]
}
}
]说明:
controller数据:controller[0]代表控制器名称,controller[1]代表控制器健康状态,controller[2]代表采集时间戳
measure数据:key代表测点名称,measure[0]代表测点健康状态,measure[1]代表测点的值
2.3 DataHub向driver写测点值
Topic:ds2/eventbus/south/write/{requestServiceId}
{requestServiceId}:消息发布者,DataHub的ServiceId为1010
Payload:
{
"msg_id": 43461834341,
"timestamp": 1610335020088,
"payload": [
{
"name": "con1",
"measures":[
{
"name": "measures1",
"value": 12
}
]
}
]
}
说明:
msg_id: 消息ID
timestamp: 时间戳
payload里的name:控制器名称
measure里的name:测点名称
value:测点值
Topic:ds2/eventbus/south/write/{requestServiceId}
{requestServiceId}:消息发布者,DataHub的ServiceId为1010
Payload:
{
"msg_id": 43461834341,
"timestamp": 1610335020088,
"payload": [
{
"name": "con1",
"measures":[
{
"name": "measures1",
"value": 12
}
]
}
]
}说明:
msg_id: 消息ID
timestamp: 时间戳
payload里的name:控制器名称
measure里的name:测点名称
value:测点值
2.4 driver向DataHub返回写测点值结果
Topic:ds2/eventbus/south/write/{requestServiceId}/response
{requestServiceId}:消息发布者,DataHub的ServiceId为1010
Payload:
{
"msg_id": 43461834341,
"timestamp": 1610335020088,
"payload": [
{
"name": "con1",
"measures":[
{
"name": "measures1",
"value": 12,
"error_code": 0,
"error_reason": ""
}
]
}
]
}
说明:
msg_id: 消息ID
timestamp: 时间戳
payload里的name:控制器名称
measure里的name:测点名称
value:测点值
error_code: 0:成功,1:写入失败
error_reason:错误原因描述
Topic:ds2/eventbus/south/write/{requestServiceId}/response
{requestServiceId}:消息发布者,DataHub的ServiceId为1010
Payload:
{
"msg_id": 43461834341,
"timestamp": 1610335020088,
"payload": [
{
"name": "con1",
"measures":[
{
"name": "measures1",
"value": 12,
"error_code": 0,
"error_reason": ""
}
]
}
]
}说明:
msg_id: 消息ID
timestamp: 时间戳
payload里的name:控制器名称
measure里的name:测点名称
value:测点值
error_code: 0:成功,1:写入失败
error_reason:错误原因描述
2.5 Modbus广播写
Topic:ds2/eventbus/south/modbus/broadcast/write
Payload:
{
"protocol": "Modbus-RTU",
"endpoint": "rs485",
"slave": 1,
"registers": [
{
"function": 1,
"address": 100,
"length": 1,
"value": ""
}
]
}
说明:
protocol: 通讯协议,Modbus-RTU/Modbus-TCP
endpoint:串口/IP地址
slave:从站地址
function: 功能码
address: 地址
length: 长度
value: 需要写入寄存器的值,base64编码
Topic:ds2/eventbus/south/modbus/broadcast/write
Payload:
{
"protocol": "Modbus-RTU",
"endpoint": "rs485",
"slave": 1,
"registers": [
{
"function": 1,
"address": 100,
"length": 1,
"value": ""
}
]
}说明:
protocol: 通讯协议,Modbus-RTU/Modbus-TCP
endpoint:串口/IP地址
slave:从站地址
function: 功能码
address: 地址
length: 长度
value: 需要写入寄存器的值,base64编码
3 北向消息总线
3.1 DataHub发布的测点分组数据,包含分组内所有测点
Topic:ds2/eventbus/north/measures/{groupName}
{groupName}:分组名
Payload:
{
"group": "group_aaa",
"measures":[
{
"ctrlName": "con1",
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12,
}
]
}
说明:
group:上传消息分组
name:测点名称
health:0 -- measure查询失败,1 -- measure查询成功
timestamp:查询操作Unix时间戳
value:测点值
Topic:ds2/eventbus/north/measures/{groupName}
{groupName}:分组名
Payload:
{
"group": "group_aaa",
"measures":[
{
"ctrlName": "con1",
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12,
}
]
}说明:
group:上传消息分组
name:测点名称
health:0 -- measure查询失败,1 -- measure查询成功
timestamp:查询操作Unix时间戳
value:测点值
3.2 DataHub发布的测点分组数据,仅包含分组内数值变化了的测点
Topic:ds2/eventbus/north/changed-measures/{groupName}
{groupName}:分组名
Payload:
{
"group": "group_aaa",
"measures":[
{
"ctrlName": "con1",
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12,
}
]
}
说明:
group:上传消息分组
name:测点名称
health:0 -- measure查询失败,1 -- measure查询成功
timestamp:查询操作Unix时间戳
value:测点值
Topic:ds2/eventbus/north/changed-measures/{groupName}
{groupName}:分组名
Payload:
{
"group": "group_aaa",
"measures":[
{
"ctrlName": "con1",
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12,
}
]
}说明:
group:上传消息分组
name:测点名称
health:0 -- measure查询失败,1 -- measure查询成功
timestamp:查询操作Unix时间戳
value:测点值
3.3 DataHub发布的告警触发/消除事件消息
Topic:ds2/eventbus/north/alarm/{alarmName}
{alarmName}:告警名称
Payload:
{
"name": "alarm1",
"ctrlName": "",
"measureName": "",
"priority": 1,
"timestamp": 1234646484,
"status": 0,
"value": 60,
"alarm_value": 60,
"content": "DATA IS OUT OF RANGE"
}
说明:
name:告警名称
ctrlName:控制器名称
measureName:测点名称
priority:内置好的告警等级,最大可支持定义5个级别 取值范围[1,5]
timestamp:时间戳
status:0:解除告警 1:触发告警
value:当前测点值
alarm_value:告警触发时测点值
content:描述
Topic:ds2/eventbus/north/alarm/{alarmName}
{alarmName}:告警名称
Payload:
{
"name": "alarm1",
"ctrlName": "",
"measureName": "",
"priority": 1,
"timestamp": 1234646484,
"status": 0,
"value": 60,
"alarm_value": 60,
"content": "DATA IS OUT OF RANGE"
}说明:
name:告警名称
ctrlName:控制器名称
measureName:测点名称
priority:内置好的告警等级,最大可支持定义5个级别 取值范围[1,5]
timestamp:时间戳
status:0:解除告警 1:触发告警
value:当前测点值
alarm_value:告警触发时测点值
content:描述
3.4 控制器状态更新消息上报
Topic:ds2/eventbus/north/controllers/delta
Payload:
[
{
"name": "dev1",
"health": 0,
"timestamp": 1606784851
},
{
"name": "dev2",
"health": 1,
"timestamp": 1606784852
}
]
说明:
name:控制器名称
health:0设备离线, 1设备在线
timestamp:控制器状态更新时刻的Unix时间戳
Topic:ds2/eventbus/north/controllers/delta
Payload:
[
{
"name": "dev1",
"health": 0,
"timestamp": 1606784851
},
{
"name": "dev2",
"health": 1,
"timestamp": 1606784852
}
]说明:
name:控制器名称
health:0设备离线, 1设备在线
timestamp:控制器状态更新时刻的Unix时间戳
3.5 更新控制器测点值(写PLC值)
Topic:ds2/eventbus/north/write/measures
Payload:
{
"task_id": 43461834341,
"controllers": [
{
"name": "con1",
"measures":[
{
"name": "measures1",
"value": 12
},
{
"name": "measures2",
"value": 13
}
]
}
]
}
说明:
task_id:任务ID
controllers里的name:控制器名称
measures里的name:测点名称
value:值
响应控制器测点更新事件。主题: ds2/eventbus/north/write/measures/response
消息格式定义:
{
"task_id": 43461834341,
"controllers": [
{
"name": "con1",
"measures":[
{
"name": "measures1",
"error_code": 0,
"error_reason": ""
},
{
"name": "measures2",
"error_code": 1,
"error_reason": "write failed"
},
]
}
]
}
说明:
task_id:任务ID
controllers里的name:控制器名称
measures里的name:测点名称
error_code:0:成功,1:写入失败
error_reason:错误原因描述
Topic:ds2/eventbus/north/write/measures
Payload:
{
"task_id": 43461834341,
"controllers": [
{
"name": "con1",
"measures":[
{
"name": "measures1",
"value": 12
},
{
"name": "measures2",
"value": 13
}
]
}
]
}说明:
task_id:任务ID
controllers里的name:控制器名称
measures里的name:测点名称
value:值
响应控制器测点更新事件。主题: ds2/eventbus/north/write/measures/response
消息格式定义:
{
"task_id": 43461834341,
"controllers": [
{
"name": "con1",
"measures":[
{
"name": "measures1",
"error_code": 0,
"error_reason": ""
},
{
"name": "measures2",
"error_code": 1,
"error_reason": "write failed"
},
]
}
]
}说明:
task_id:任务ID
controllers里的name:控制器名称
measures里的name:测点名称
error_code:0:成功,1:写入失败
error_reason:错误原因描述
3.6 数据召读
主动获取控制器测点值(召唤数据)。
Topic:ds2/eventbus/north/recall/measures
Payload:
// 请求
{
"task_id": 43461834341,
"recallType": "group",
"groups": ["group_name_1", ],
"controllers": [
{
"name": "ctrl1",
"measures": ["measure_name_1", ]
}
]
}
说明:
task_id:任务ID,仅"recallType" == "measure"有效
recallType:支持group, measure
当"recallType" == "group"时测点数据通过ds2/eventbus/north/measures/{groupName}上传,内容见测点分组上报。
当"recallType" == "measure"时测点数据通过ds2/eventbus/north/recall/measures/response上传,内容如下:如果controllers == [],即没指定测点名称
groups:测点组列表,仅"recallType" == "group"有效。
controllers:控制器列表,仅"recallType" == "measure"有效。测点总数需要限制,具体值待定。
name:控制器名称
measures:测点列表
Payload:
// 响应对应"recallType" == "measure"
{
"task_id": 43461834341,
"recallType": "measure",
"controllers": [
{
"name": "con1",
"health": 1,
"timestamp": 1582771955,
"measures":[
{
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12
}
]
}
]
}
主动获取控制器测点值(召唤数据)。
Topic:ds2/eventbus/north/recall/measures
Payload:
// 请求
{
"task_id": 43461834341,
"recallType": "group",
"groups": ["group_name_1", ],
"controllers": [
{
"name": "ctrl1",
"measures": ["measure_name_1", ]
}
]
}说明:
task_id:任务ID,仅"recallType" == "measure"有效
recallType:支持group, measure
当"recallType" == "group"时测点数据通过ds2/eventbus/north/measures/{groupName}上传,内容见测点分组上报。
当"recallType" == "measure"时测点数据通过ds2/eventbus/north/recall/measures/response上传,内容如下:如果controllers == [],即没指定测点名称
groups:测点组列表,仅"recallType" == "group"有效。
controllers:控制器列表,仅"recallType" == "measure"有效。测点总数需要限制,具体值待定。
name:控制器名称
measures:测点列表
Payload:
// 响应对应"recallType" == "measure"
{
"task_id": 43461834341,
"recallType": "measure",
"controllers": [
{
"name": "con1",
"health": 1,
"timestamp": 1582771955,
"measures":[
{
"name": "measures1",
"health": 1,
"timestamp": 1582771955,
"value": 12
}
]
}
]
}
Related Articles
北京映翰通IR900工业级路由器产品用户手册
声明 首先非常感谢您选择本公司产品!在使用前,请您仔细阅读本用户手册。 非本公司书面许可,任何单位和个人不得擅自摘抄、复制本手册内容的部分或全部,并不得以任何形式传播。 由于不断更新,本公司不能承诺该资料与实际产品一致,同时也不承担由于实际技术参数与本资料不符所导致的任何争议,任何改动恕不提前通知。本公司保留最终更改权和解释权。 版权所有©北京映翰通网络技术股份有限公司及其许可者版权所有,保留一切权利。 本手册图形界面约定 格式 意义 < > 带尖括号“< ...InGateway902用户手册
1. 设备简介 1.1 概述 InGateway902(以下简称IG902)系列边缘计算网关是映翰通公司面向工业物联网领域推出的新一代 4G 边缘计算网关。该产品凭借全球部署的 3G/4G 无线网络和多种宽带服务,提供随处可得的不间断的互联网接入。以其强大的边缘计算能力、全面的安全性和无线服务等特性,实现多达万级的设备联网,为真正意义上的设备信息化提供数据的高速通路。IG902 ...EC300用户手册_V1.2
边缘计算机EC300系列 用户手册 (适用于IEOS V2.0.0及以上版本) Version 1.2,2024年4月 www.inhand.com.cn 本手册中描述的软件是根据许可协议提供的,只能按照该协议的条款使用。 版权声明 © 2023 映翰通网络 保留所有权利。 商标 InHand标志是映翰通网络的注册商标。 本手册中的所有其他商标或注册商标属于其各自的制造商。 免责声明 ...EC954用户手册V2.0
边缘计算机EC950系列 用户手册 (适用于Debian11,IEOS V2.0.0及以上版本) Version2.0,2024年01月 www.inhand.com.cn 本手册中描述的软件是根据许可协议提供的,只能按照该协议的条款使用。 版权声明 © 2023 映翰通网络 保留所有权利。 商标 InHand标志是映翰通网络的注册商标。 本手册中的所有其他商标或注册商标属于其各自的制造商。 免责声明 ...EC942用户手册_V2.0
边缘计算机EC900系列 用户手册 (适用于Debian10,IEOS V2.0.0及以上版本) Version2.0,2023年10月 www.inhand.com.cn 本手册中描述的软件是根据许可协议提供的,只能按照该协议的条款使用。 版权声明 © 2023 映翰通网络 保留所有权利。 商标 InHand标志是映翰通网络的注册商标。 本手册中的所有其他商标或注册商标属于其各自的制造商。 免责声明 ...